







aucune réponse dans cleanflight
Page 1 sur 2 • 1, 2 
aucune réponse dans cleanflight
par Invité Mar 11 Déc 2018 - 14:12
voici mon problème, j'ai acheter une taranis X9D plus en prenant soi de bien prendre une version EU-LBT, j'ai acheté également un récepteur X6R en EU-LBT, j'ai monté mon nouveau drone, en prenant soin de bien suivre le schéma de montage de ma carte de vol qui est une KAKUTE F4 V2, j'ai fais ensuite le bind avec le récepteur tous c'est bien passé, la petite LED verte m'indiquant que l'appairage était ok, je décide donc de le connecter sur cleanflight afin de peaufiner tous mes réglages, et la c'est le drame, sur l'onglet récepteur quand je bouge le throttle ou le yaw etc, rien ne ce passe sur cleanflight hors cela bouge bien dans la manette, je ne vois pas quel réglages j'aurais oublié dans la manette ou dans CF je précise que c'est du SBUS.
Si toutefois quelqu'un à déjà eu ce problème, ou si une bonne âme pouvais m' éclairer cela serait fort sympathique car la je sèche.
Merci à vous.
Invité- Invité
Re: aucune réponse dans cleanflight
par Mipel Mar 11 Déc 2018 - 17:37
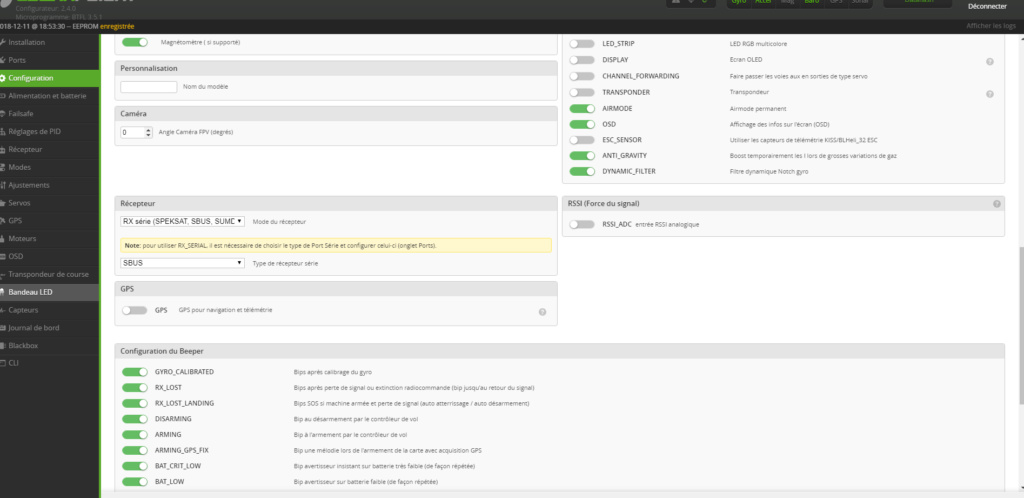
Une capture de l'onglet port + configuration de Cleanflight pour vérifier si le Serial Rx est correctement choisi, il devrait être sur l'UART 3 selon la doc.
Coté récepteur, il doit être bindé en mode D16 voies 1-6 avec télémétrie en utilisant la sortie sbus évidemment. Il faudrait aussi fournir le rapport du dump (commande dump dans le cli) pour voir si tout est conforme dans la configuration car il peut y avoir plusieurs causes au problème décrit. As-tu flashé la carte avant de tenter les réglages ?
On va analyser la chose, rien de grave sans doute.
_________________
Electrique :
Avions: clik R2 + mini-polyclub en indoor
Planeurs: Gem, Serenity et Typhoon
Hélicos: Trex 450-550
Drones: Wizard X220, Aurora 90 vol à vue+fpv
Thermique :
Extra 300 78'' avec DLE 35RA
Besoin d'infos ? https://opentx-doc.fr/ (co-admin du site avec LapinFou)

Mipel- Modérateur
-
 Messages : 3354
Messages : 3354
Date d'inscription : 08/06/2017
Age : 66
Localisation : 85 Vendée - Aéromodélisme Sablais -

Re: aucune réponse dans cleanflight
par Invité Mar 11 Déc 2018 - 18:16
Invité- Invité
Re: aucune réponse dans cleanflight
par Mipel Mar 11 Déc 2018 - 18:27
Merci d'envoyer les captures d'écrans demandées, ça permet de certifier les réglages.
_________________
Electrique :
Avions: clik R2 + mini-polyclub en indoor
Planeurs: Gem, Serenity et Typhoon
Hélicos: Trex 450-550
Drones: Wizard X220, Aurora 90 vol à vue+fpv
Thermique :
Extra 300 78'' avec DLE 35RA
Besoin d'infos ? https://opentx-doc.fr/ (co-admin du site avec LapinFou)
Mipel- Modérateur
- Messages : 3354
Date d'inscription : 08/06/2017
Age : 66
Localisation : 85 Vendée - Aéromodélisme Sablais -
Re: aucune réponse dans cleanflight
par Invité Mar 11 Déc 2018 - 18:59
- Code:
Entering CLI Mode, type 'exit' to return, or 'help'
# DUMP
# version
# Betaflight / KAKUTEF4V2 (KTV2) 3.5.1 Sep 8 2018 / 05:24:58 (d9fb5ca13) MSP API: 1.40
board_name KAKUTEF4V2
manufacturer_id
# name
name -
# resources
resource BEEPER 1 C09
resource MOTOR 1 B00
resource MOTOR 2 B01
resource MOTOR 3 A03
resource MOTOR 4 A02
resource MOTOR 5 NONE
resource MOTOR 6 NONE
resource MOTOR 7 NONE
resource MOTOR 8 NONE
resource SERVO 1 NONE
resource SERVO 2 NONE
resource SERVO 3 NONE
resource SERVO 4 NONE
resource SERVO 5 NONE
resource SERVO 6 NONE
resource SERVO 7 NONE
resource SERVO 8 NONE
resource PPM 1 C07
resource PWM 1 NONE
resource PWM 2 NONE
resource PWM 3 NONE
resource PWM 4 NONE
resource PWM 5 NONE
resource PWM 6 NONE
resource PWM 7 NONE
resource PWM 8 NONE
resource LED_STRIP 1 C08
resource SERIAL_TX 1 A09
resource SERIAL_TX 2 NONE
resource SERIAL_TX 3 B10
resource SERIAL_TX 4 A00
resource SERIAL_TX 5 NONE
resource SERIAL_TX 6 C06
resource SERIAL_TX 7 NONE
resource SERIAL_TX 8 NONE
resource SERIAL_TX 9 NONE
resource SERIAL_TX 10 NONE
resource SERIAL_TX 11 NONE
resource SERIAL_RX 1 A10
resource SERIAL_RX 2 NONE
resource SERIAL_RX 3 B11
resource SERIAL_RX 4 A01
resource SERIAL_RX 5 D02
resource SERIAL_RX 6 C07
resource SERIAL_RX 7 NONE
resource SERIAL_RX 8 NONE
resource SERIAL_RX 9 NONE
resource SERIAL_RX 10 NONE
resource SERIAL_RX 11 NONE
resource INVERTER 1 NONE
resource INVERTER 2 NONE
resource INVERTER 3 B15
resource INVERTER 4 NONE
resource INVERTER 5 NONE
resource INVERTER 6 NONE
resource INVERTER 7 NONE
resource INVERTER 8 NONE
resource INVERTER 9 NONE
resource INVERTER 10 NONE
resource INVERTER 11 NONE
resource I2C_SCL 1 B08
resource I2C_SCL 2 NONE
resource I2C_SCL 3 NONE
resource I2C_SDA 1 B09
resource I2C_SDA 2 NONE
resource I2C_SDA 3 NONE
resource LED 1 B05
resource LED 2 B04
resource LED 3 B06
resource RX_BIND 1 NONE
resource RX_BIND_PLUG 1 NONE
resource SPI_SCK 1 A05
resource SPI_SCK 2 NONE
resource SPI_SCK 3 C10
resource SPI_MISO 1 A06
resource SPI_MISO 2 NONE
resource SPI_MISO 3 C11
resource SPI_MOSI 1 A07
resource SPI_MOSI 2 NONE
resource SPI_MOSI 3 C12
resource ESCSERIAL 1 C07
resource CAMERA_CONTROL 1 NONE
resource ADC_BATT 1 C03
resource ADC_RSSI 1 C01
resource ADC_CURR 1 C02
resource ADC_EXT 1 NONE
resource BARO_CS 1 NONE
resource COMPASS_CS 1 NONE
resource PINIO 1 NONE
resource PINIO 2 NONE
resource PINIO 3 NONE
resource PINIO 4 NONE
resource USB_MSC_PIN 1 NONE
resource FLASH_CS 1 B03
resource OSD_CS 1 B14
resource SPI_PREINIT_IPU 1 C04
resource SPI_PREINIT_IPU 2 B03
resource SPI_PREINIT_IPU 3 NONE
resource SPI_PREINIT_IPU 4 NONE
resource SPI_PREINIT_IPU 5 NONE
resource SPI_PREINIT_IPU 6 NONE
resource SPI_PREINIT_IPU 7 NONE
resource SPI_PREINIT_IPU 8 NONE
resource SPI_PREINIT_IPU 9 NONE
resource SPI_PREINIT_IPU 10 NONE
resource SPI_PREINIT_IPU 11 NONE
resource SPI_PREINIT_OPU 1 B14
resource SPI_PREINIT_OPU 2 NONE
# mixer
mixer QUADX
mmix reset
# servo
servo 0 1000 2000 1500 100 -1
servo 1 1000 2000 1500 100 -1
servo 2 1000 2000 1500 100 -1
servo 3 1000 2000 1500 100 -1
servo 4 1000 2000 1500 100 -1
servo 5 1000 2000 1500 100 -1
servo 6 1000 2000 1500 100 -1
servo 7 1000 2000 1500 100 -1
# servo mix
smix reset
# feature
feature -RX_PPM
feature -INFLIGHT_ACC_CAL
feature -RX_SERIAL
feature -MOTOR_STOP
feature -SERVO_TILT
feature -SOFTSERIAL
feature -GPS
feature -RANGEFINDER
feature -TELEMETRY
feature -3D
feature -RX_PARALLEL_PWM
feature -RX_MSP
feature -RSSI_ADC
feature -LED_STRIP
feature -DISPLAY
feature -OSD
feature -CHANNEL_FORWARDING
feature -TRANSPONDER
feature -AIRMODE
feature -RX_SPI
feature -SOFTSPI
feature -ESC_SENSOR
feature -ANTI_GRAVITY
feature -DYNAMIC_FILTER
feature RX_SERIAL
feature OSD
feature AIRMODE
feature ANTI_GRAVITY
feature DYNAMIC_FILTER
# beeper
beeper GYRO_CALIBRATED
beeper RX_LOST
beeper RX_LOST_LANDING
beeper DISARMING
beeper ARMING
beeper ARMING_GPS_FIX
beeper BAT_CRIT_LOW
beeper BAT_LOW
beeper GPS_STATUS
beeper RX_SET
beeper ACC_CALIBRATION
beeper ACC_CALIBRATION_FAIL
beeper READY_BEEP
beeper MULTI_BEEPS
beeper DISARM_REPEAT
beeper ARMED
beeper SYSTEM_INIT
beeper ON_USB
beeper BLACKBOX_ERASE
beeper CRASH FLIP
beeper CAM_CONNECTION_OPEN
beeper CAM_CONNECTION_CLOSED
beeper RC_SMOOTHING_INIT_FAIL
# beacon
beacon GYRO_CALIBRATED
beacon RX_LOST
beacon RX_LOST_LANDING
beacon DISARMING
beacon ARMING
beacon ARMING_GPS_FIX
beacon BAT_CRIT_LOW
beacon BAT_LOW
beacon GPS_STATUS
beacon -RX_SET
beacon ACC_CALIBRATION
beacon ACC_CALIBRATION_FAIL
beacon READY_BEEP
beacon MULTI_BEEPS
beacon DISARM_REPEAT
beacon ARMED
beacon SYSTEM_INIT
beacon ON_USB
beacon BLACKBOX_ERASE
beacon CRASH FLIP
beacon CAM_CONNECTION_OPEN
beacon CAM_CONNECTION_CLOSED
beacon RC_SMOOTHING_INIT_FAIL
# map
map TAER1234
# serial
serial 20 1 115200 57600 0 115200
serial 0 32 115200 57600 0 115200
serial 2 64 115200 57600 0 115200
serial 3 16384 115200 57600 0 115200
serial 4 0 115200 57600 0 115200
serial 5 8192 115200 57600 0 115200
# led
led 0 0,0::C:0
led 1 0,0::C:0
led 2 0,0::C:0
led 3 0,0::C:0
led 4 0,0::C:0
led 5 0,0::C:0
led 6 0,0::C:0
led 7 0,0::C:0
led 8 0,0::C:0
led 9 0,0::C:0
led 10 0,0::C:0
led 11 0,0::C:0
led 12 0,0::C:0
led 13 0,0::C:0
led 14 0,0::C:0
led 15 0,0::C:0
led 16 0,0::C:0
led 17 0,0::C:0
led 18 0,0::C:0
led 19 0,0::C:0
led 20 0,0::C:0
led 21 0,0::C:0
led 22 0,0::C:0
led 23 0,0::C:0
led 24 0,0::C:0
led 25 0,0::C:0
led 26 0,0::C:0
led 27 0,0::C:0
led 28 0,0::C:0
led 29 0,0::C:0
led 30 0,0::C:0
led 31 0,0::C:0
# color
color 0 0,0,0
color 1 0,255,255
color 2 0,0,255
color 3 30,0,255
color 4 60,0,255
color 5 90,0,255
color 6 120,0,255
color 7 150,0,255
color 8 180,0,255
color 9 210,0,255
color 10 240,0,255
color 11 270,0,255
color 12 300,0,255
color 13 330,0,255
color 14 0,0,0
color 15 0,0,0
# mode_color
mode_color 0 0 1
mode_color 0 1 11
mode_color 0 2 2
mode_color 0 3 13
mode_color 0 4 10
mode_color 0 5 3
mode_color 1 0 5
mode_color 1 1 11
mode_color 1 2 3
mode_color 1 3 13
mode_color 1 4 10
mode_color 1 5 3
mode_color 2 0 10
mode_color 2 1 11
mode_color 2 2 4
mode_color 2 3 13
mode_color 2 4 10
mode_color 2 5 3
mode_color 3 0 8
mode_color 3 1 11
mode_color 3 2 4
mode_color 3 3 13
mode_color 3 4 10
mode_color 3 5 3
mode_color 4 0 7
mode_color 4 1 11
mode_color 4 2 3
mode_color 4 3 13
mode_color 4 4 10
mode_color 4 5 3
mode_color 5 0 9
mode_color 5 1 11
mode_color 5 2 2
mode_color 5 3 13
mode_color 5 4 10
mode_color 5 5 3
mode_color 6 0 6
mode_color 6 1 10
mode_color 6 2 1
mode_color 6 3 0
mode_color 6 4 0
mode_color 6 5 2
mode_color 6 6 3
mode_color 6 7 6
mode_color 6 8 0
mode_color 6 9 0
mode_color 6 10 0
mode_color 7 0 3
# aux
aux 0 0 0 900 900 0 0
aux 1 0 0 900 900 0 0
aux 2 0 0 900 900 0 0
aux 3 0 0 900 900 0 0
aux 4 0 0 900 900 0 0
aux 5 0 0 900 900 0 0
aux 6 0 0 900 900 0 0
aux 7 0 0 900 900 0 0
aux 8 0 0 900 900 0 0
aux 9 0 0 900 900 0 0
aux 10 0 0 900 900 0 0
aux 11 0 0 900 900 0 0
aux 12 0 0 900 900 0 0
aux 13 0 0 900 900 0 0
aux 14 0 0 900 900 0 0
aux 15 0 0 900 900 0 0
aux 16 0 0 900 900 0 0
aux 17 0 0 900 900 0 0
aux 18 0 0 900 900 0 0
aux 19 0 0 900 900 0 0
# adjrange
adjrange 0 0 0 900 900 0 0 0 0
adjrange 1 0 0 900 900 0 0 0 0
adjrange 2 0 0 900 900 0 0 0 0
adjrange 3 0 0 900 900 0 0 0 0
adjrange 4 0 0 900 900 0 0 0 0
adjrange 5 0 0 900 900 0 0 0 0
adjrange 6 0 0 900 900 0 0 0 0
adjrange 7 0 0 900 900 0 0 0 0
adjrange 8 0 0 900 900 0 0 0 0
adjrange 9 0 0 900 900 0 0 0 0
adjrange 10 0 0 900 900 0 0 0 0
adjrange 11 0 0 900 900 0 0 0 0
adjrange 12 0 0 900 900 0 0 0 0
adjrange 13 0 0 900 900 0 0 0 0
adjrange 14 0 0 900 900 0 0 0 0
# rxrange
rxrange 0 1000 2000
rxrange 1 1000 2000
rxrange 2 1000 2000
rxrange 3 1000 2000
# vtx
vtx 0 0 0 0 900 900
vtx 1 0 0 0 900 900
vtx 2 0 0 0 900 900
vtx 3 0 0 0 900 900
vtx 4 0 0 0 900 900
vtx 5 0 0 0 900 900
vtx 6 0 0 0 900 900
vtx 7 0 0 0 900 900
vtx 8 0 0 0 900 900
vtx 9 0 0 0 900 900
# rxfail
rxfail 0 a
rxfail 1 a
rxfail 2 a
rxfail 3 a
rxfail 4 h
rxfail 5 h
rxfail 6 h
rxfail 7 h
rxfail 8 h
rxfail 9 h
rxfail 10 h
rxfail 11 h
rxfail 12 h
rxfail 13 h
rxfail 14 h
rxfail 15 h
rxfail 16 h
rxfail 17 h
# master
set align_gyro = DEFAULT
set gyro_hardware_lpf = NORMAL
set gyro_32khz_hardware_lpf = NORMAL
set gyro_sync_denom = 1
set gyro_lowpass_type = PT1
set gyro_lowpass_hz = 100
set gyro_lowpass2_type = PT1
set gyro_lowpass2_hz = 300
set gyro_notch1_hz = 0
set gyro_notch1_cutoff = 0
set gyro_notch2_hz = 0
set gyro_notch2_cutoff = 0
set gyro_calib_duration = 125
set gyro_calib_noise_limit = 48
set gyro_offset_yaw = 0
set gyro_overflow_detect = ALL
set yaw_spin_recovery = ON
set yaw_spin_threshold = 1950
set gyro_use_32khz = OFF
set dyn_notch_quality = 70
set dyn_notch_width_percent = 50
set align_acc = DEFAULT
set acc_hardware = AUTO
set acc_lpf_hz = 10
set acc_trim_pitch = 0
set acc_trim_roll = 0
set acc_calibration = 44,-15,-151
set align_mag = DEFAULT
set mag_bustype = I2C
set mag_i2c_device = 1
set mag_i2c_address = 0
set mag_spi_device = 0
set mag_hardware = AUTO
set mag_declination = 0
set mag_calibration = 0,0,0
set baro_bustype = I2C
set baro_spi_device = 0
set baro_i2c_device = 1
set baro_i2c_address = 0
set baro_hardware = AUTO
set baro_tab_size = 21
set baro_noise_lpf = 600
set baro_cf_vel = 985
set baro_cf_alt = 965
set mid_rc = 1500
set min_check = 1015
set max_check = 2000
set rssi_channel = 0
set rssi_src_frame_errors = OFF
set rssi_scale = 100
set rssi_offset = 0
set rssi_invert = OFF
set rc_interp = AUTO
set rc_interp_ch = RPYT
set rc_interp_int = 19
set rc_smoothing_type = INTERPOLATION
set rc_smoothing_input_hz = 0
set rc_smoothing_derivative_hz = 0
set rc_smoothing_debug_axis = ROLL
set rc_smoothing_input_type = BIQUAD
set rc_smoothing_derivative_type = BIQUAD
set fpv_mix_degrees = 0
set max_aux_channels = 14
set serialrx_provider = SBUS
set serialrx_inverted = OFF
set spektrum_sat_bind = 0
set spektrum_sat_bind_autoreset = ON
set airmode_start_throttle_percent = 32
set rx_min_usec = 885
set rx_max_usec = 2115
set serialrx_halfduplex = OFF
set adc_device = 1
set input_filtering_mode = OFF
set blackbox_p_ratio = 32
set blackbox_device = SERIAL
set blackbox_record_acc = ON
set blackbox_mode = NORMAL
set min_throttle = 1070
set max_throttle = 2000
set min_command = 1000
set dshot_idle_value = 450
set dshot_burst = OFF
set use_unsynced_pwm = OFF
set motor_pwm_protocol = DSHOT1200
set motor_pwm_rate = 480
set motor_pwm_inversion = OFF
set motor_poles = 14
set thr_corr_value = 0
set thr_corr_angle = 800
set failsafe_delay = 4
set failsafe_off_delay = 10
set failsafe_throttle = 1015
set failsafe_switch_mode = STAGE2
set failsafe_throttle_low_delay = 100
set failsafe_procedure = AUTO-LAND
set align_board_roll = 0
set align_board_pitch = 0
set align_board_yaw = 0
set gimbal_mode = NORMAL
set bat_capacity = 0
set vbat_max_cell_voltage = 48
set vbat_full_cell_voltage = 41
set vbat_min_cell_voltage = 33
set vbat_warning_cell_voltage = 35
set vbat_hysteresis = 1
set current_meter = NONE
set battery_meter = NONE
set vbat_detect_cell_voltage = 30
set use_vbat_alerts = ON
set use_cbat_alerts = OFF
set cbat_alert_percent = 10
set vbat_cutoff_percent = 100
set vbat_scale = 110
set vbat_divider = 10
set vbat_multiplier = 1
set ibata_scale = 400
set ibata_offset = 0
set ibatv_scale = 0
set ibatv_offset = 0
set beeper_inversion = ON
set beeper_od = OFF
set beeper_frequency = 0
set beeper_dshot_beacon_tone = 1
set yaw_motors_reversed = OFF
set crashflip_motor_percent = 0
set 3d_deadband_low = 1406
set 3d_deadband_high = 1514
set 3d_neutral = 1460
set 3d_deadband_throttle = 50
set 3d_limit_low = 1000
set 3d_limit_high = 2000
set 3d_switched_mode = OFF
set servo_center_pulse = 1500
set servo_pwm_rate = 50
set servo_lowpass_hz = 0
set tri_unarmed_servo = ON
set channel_forwarding_start = 4
set reboot_character = 82
set serial_update_rate_hz = 100
set accxy_deadband = 40
set accz_deadband = 40
set acc_unarmedcal = ON
set imu_dcm_kp = 2500
set imu_dcm_ki = 0
set small_angle = 25
set auto_disarm_delay = 5
set gyro_cal_on_first_arm = OFF
set gps_provider = NMEA
set gps_sbas_mode = AUTO
set gps_auto_config = ON
set gps_auto_baud = OFF
set gps_ublox_use_galileo = OFF
set gps_rescue_angle = 32
set gps_rescue_initial_alt = 50
set gps_rescue_descent_dist = 200
set gps_rescue_ground_speed = 2000
set gps_rescue_throttle_p = 150
set gps_rescue_throttle_i = 20
set gps_rescue_throttle_d = 50
set gps_rescue_velocity_p = 80
set gps_rescue_velocity_i = 20
set gps_rescue_velocity_d = 15
set gps_rescue_yaw_p = 40
set gps_rescue_throttle_min = 1200
set gps_rescue_throttle_max = 1600
set gps_rescue_throttle_hover = 1280
set gps_rescue_sanity_checks = RESCUE_SANITY_ON
set gps_rescue_min_sats = 8
set deadband = 0
set yaw_deadband = 0
set yaw_control_reversed = OFF
set pid_process_denom = 4
set runaway_takeoff_prevention = ON
set runaway_takeoff_deactivate_delay = 500
set runaway_takeoff_deactivate_throttle_percent = 25
set tlm_inverted = ON
set tlm_halfduplex = OFF
set frsky_default_lat = 0
set frsky_default_long = 0
set frsky_gps_format = 0
set frsky_unit = IMPERIAL
set frsky_vfas_precision = 0
set hott_alarm_int = 5
set pid_in_tlm = OFF
set report_cell_voltage = OFF
set ibus_sensor = 1,2,3,0,0,0,0,0,0,0,0,0,0,0,0
set smartport_use_extra_sensors = OFF
set ledstrip_visual_beeper = OFF
set ledstrip_grb_rgb = GRB
set osd_units = METRIC
set osd_warn_arming_disable = ON
set osd_warn_batt_not_full = ON
set osd_warn_batt_warning = ON
set osd_warn_batt_critical = ON
set osd_warn_visual_beeper = ON
set osd_warn_crash_flip = ON
set osd_warn_esc_fail = ON
set osd_warn_core_temp = ON
set osd_rssi_alarm = 20
set osd_cap_alarm = 2200
set osd_alt_alarm = 100
set osd_esc_temp_alarm = -128
set osd_esc_rpm_alarm = -1
set osd_esc_current_alarm = -1
set osd_core_temp_alarm = 70
set osd_ah_max_pit = 20
set osd_ah_max_rol = 40
set osd_tim1 = 2560
set osd_tim2 = 2561
set osd_vbat_pos = 234
set osd_rssi_pos = 234
set osd_tim_1_pos = 234
set osd_tim_2_pos = 234
set osd_remaining_time_estimate_pos = 234
set osd_flymode_pos = 234
set osd_anti_gravity_pos = 234
set osd_g_force_pos = 234
set osd_throttle_pos = 234
set osd_vtx_channel_pos = 234
set osd_crosshairs_pos = 205
set osd_ah_sbar_pos = 206
set osd_ah_pos = 78
set osd_current_pos = 234
set osd_mah_drawn_pos = 234
set osd_craft_name_pos = 234
set osd_gps_speed_pos = 234
set osd_gps_lon_pos = 234
set osd_gps_lat_pos = 234
set osd_gps_sats_pos = 234
set osd_home_dir_pos = 234
set osd_home_dist_pos = 234
set osd_compass_bar_pos = 234
set osd_altitude_pos = 234
set osd_pid_roll_pos = 234
set osd_pid_pitch_pos = 234
set osd_pid_yaw_pos = 234
set osd_debug_pos = 234
set osd_power_pos = 234
set osd_pidrate_profile_pos = 234
set osd_warnings_pos = 2377
set osd_avg_cell_voltage_pos = 234
set osd_pit_ang_pos = 234
set osd_rol_ang_pos = 234
set osd_battery_usage_pos = 234
set osd_disarmed_pos = 234
set osd_nheading_pos = 234
set osd_nvario_pos = 234
set osd_esc_tmp_pos = 234
set osd_esc_rpm_pos = 234
set osd_rtc_date_time_pos = 234
set osd_adjustment_range_pos = 234
set osd_core_temp_pos = 234
set osd_stat_rtc_date_time = OFF
set osd_stat_tim_1 = OFF
set osd_stat_tim_2 = ON
set osd_stat_max_spd = ON
set osd_stat_max_dist = OFF
set osd_stat_min_batt = ON
set osd_stat_endbatt = OFF
set osd_stat_battery = OFF
set osd_stat_min_rssi = ON
set osd_stat_max_curr = ON
set osd_stat_used_mah = ON
set osd_stat_max_alt = OFF
set osd_stat_bbox = ON
set osd_stat_bb_no = ON
set task_statistics = ON
set debug_mode = NONE
set rate_6pos_switch = OFF
set cpu_overclock = OFF
set pwr_on_arm_grace = 5
set vtx_band = 4
set vtx_channel = 1
set vtx_power = 1
set vtx_low_power_disarm = OFF
set vtx_freq = 5740
set vtx_pit_mode_freq = 0
set vtx_halfduplex = ON
set vcd_video_system = AUTO
set vcd_h_offset = 0
set vcd_v_offset = 0
set max7456_clock = DEFAULT
set max7456_spi_bus = 3
set displayport_msp_col_adjust = 0
set displayport_msp_row_adjust = 0
set displayport_max7456_col_adjust = 0
set displayport_max7456_row_adjust = 0
set displayport_max7456_inv = OFF
set displayport_max7456_blk = 0
set displayport_max7456_wht = 2
set esc_sensor_halfduplex = OFF
set esc_sensor_current_offset = 0
set led_inversion = 0
set dashboard_i2c_bus = 1
set dashboard_i2c_addr = 60
set camera_control_mode = HARDWARE_PWM
set camera_control_ref_voltage = 330
set camera_control_key_delay = 180
set camera_control_internal_resistance = 470
set camera_control_inverted = OFF
set pinio_config = 1,1,1,1
set pinio_box = 255,255,255,255
set usb_hid_cdc = OFF
set usb_msc_pin_pullup = OFF
set flash_spi_bus = 3
set rcdevice_init_dev_attempts = 4
set rcdevice_init_dev_attempt_interval = 1000
# profile
profile 0
set dterm_lowpass_type = PT1
set dterm_lowpass_hz = 100
set dterm_lowpass2_hz = 200
set dterm_notch_hz = 0
set dterm_notch_cutoff = 160
set vbat_pid_gain = OFF
set pid_at_min_throttle = ON
set anti_gravity_mode = SMOOTH
set anti_gravity_threshold = 250
set anti_gravity_gain = 5000
set feedforward_transition = 0
set acc_limit_yaw = 100
set acc_limit = 0
set crash_dthreshold = 50
set crash_gthreshold = 400
set crash_setpoint_threshold = 350
set crash_time = 500
set crash_delay = 0
set crash_recovery_angle = 10
set crash_recovery_rate = 100
set crash_limit_yaw = 200
set crash_recovery = OFF
set iterm_rotation = ON
set smart_feedforward = OFF
set iterm_relax = OFF
set iterm_relax_type = GYRO
set iterm_relax_cutoff = 11
set iterm_windup = 40
set iterm_limit = 150
set pidsum_limit = 500
set pidsum_limit_yaw = 400
set yaw_lowpass_hz = 0
set throttle_boost = 5
set throttle_boost_cutoff = 15
set acro_trainer_angle_limit = 20
set acro_trainer_lookahead_ms = 50
set acro_trainer_debug_axis = ROLL
set acro_trainer_gain = 75
set p_pitch = 50
set i_pitch = 50
set d_pitch = 27
set f_pitch = 60
set p_roll = 46
set i_roll = 45
set d_roll = 25
set f_roll = 60
set p_yaw = 65
set i_yaw = 45
set d_yaw = 0
set f_yaw = 60
set p_level = 50
set i_level = 50
set d_level = 75
set level_limit = 55
set horizon_tilt_effect = 75
set horizon_tilt_expert_mode = OFF
set abs_control_gain = 0
set abs_control_limit = 90
set abs_control_error_limit = 20
# rateprofile
rateprofile 0
set thr_mid = 50
set thr_expo = 0
set rates_type = BETAFLIGHT
set roll_rc_rate = 100
set pitch_rc_rate = 100
set yaw_rc_rate = 100
set roll_expo = 0
set pitch_expo = 0
set yaw_expo = 0
set roll_srate = 70
set pitch_srate = 70
set yaw_srate = 70
set tpa_rate = 10
set tpa_breakpoint = 1650
set throttle_limit_type = OFF
set throttle_limit_percent = 100
voici le dump
MODIFIE PAR LAPINFOU
Invité- Invité


Re: aucune réponse dans cleanflight
par Mipel Mar 11 Déc 2018 - 19:43
pour le dump, tu pouvais utiliser l'icone caché qui évite d'avoir toute la conf affichée par défaut dans le message.
Coté câblage, tout est ok ?
Possible de tester ton X6R sur une autre carte ? Et quel programme as-tu prévu dans la X9D pour ce modèle ?
_________________
Electrique :
Avions: clik R2 + mini-polyclub en indoor
Planeurs: Gem, Serenity et Typhoon
Hélicos: Trex 450-550
Drones: Wizard X220, Aurora 90 vol à vue+fpv
Thermique :
Extra 300 78'' avec DLE 35RA
Besoin d'infos ? https://opentx-doc.fr/ (co-admin du site avec LapinFou)
Mipel- Modérateur
- Messages : 3354
Date d'inscription : 08/06/2017
Age : 66
Localisation : 85 Vendée - Aéromodélisme Sablais -
Re: aucune réponse dans cleanflight
par Invité Mar 11 Déc 2018 - 20:11
Invité- Invité
Re: aucune réponse dans cleanflight
par LapinFou Mar 11 Déc 2018 - 20:16
Modif faite.Mipel a écrit:pour le dump, tu pouvais utiliser l'icone caché qui évite d'avoir toute la conf affichée par défaut dans le message.
_________________
Pas de support par MP !! Pour garder l'esprit communautaire, on partage tout sur le forum.


Maintenant que vous avez tout lu, vous pouvez poser vos questions !
OpenTX is user friendly!!! It's just selective about who its friends are....

LapinFou- Administrateur
- Messages : 16994
Date d'inscription : 09/09/2014
Age : 49
Localisation : Falaise -
Re: aucune réponse dans cleanflight
par Mipel Mar 11 Déc 2018 - 21:04
Sinon, il faut procéder par élimination :
radio = programme simple des 4 voies pitch, roll, yaw et Throttle. ensuite tester le récepteur si possible sur une autre carte. Dans le dump, je n'ai rien vu de spécial:
set serialrx_provider = SBUS
set serialrx_inverted = OFF
set rx_min_usec = 885
set rx_max_usec = 2115
set serialrx_halfduplex = OFF
pour le SBUS, je vois dans la doc que:
R3, T3
UART3 RX and TX (automatic SBUS inversion) Vérifier la qualité et la conformité des soudures (sortie SBUS du R6X) sur la carte de vol comme indiqué dans la doc.
_________________
Electrique :
Avions: clik R2 + mini-polyclub en indoor
Planeurs: Gem, Serenity et Typhoon
Hélicos: Trex 450-550
Drones: Wizard X220, Aurora 90 vol à vue+fpv
Thermique :
Extra 300 78'' avec DLE 35RA
Besoin d'infos ? https://opentx-doc.fr/ (co-admin du site avec LapinFou)
Mipel- Modérateur
- Messages : 3354
Date d'inscription : 08/06/2017
Age : 66
Localisation : 85 Vendée - Aéromodélisme Sablais -
Re: aucune réponse dans cleanflight
par Invité Mar 11 Déc 2018 - 22:47
Invité- Invité
Re: aucune réponse dans cleanflight
par Invité Mar 11 Déc 2018 - 22:48
Invité- Invité
Re: aucune réponse dans cleanflight
par Invité Mer 12 Déc 2018 - 1:08
https://www.youtube.com/watch?v=53oqmM3Y26I
Invité- Invité
Re: aucune réponse dans cleanflight
par gravel Mer 12 Déc 2018 - 1:21
J'avais eu le même soucis avec Betaflight : Bindage OK et pas de réaction aux manches. Rebinder ? flasher ?
J'ai trouvé cette vidéo que j'ai suivie à la lettre et tout est rentrée dans l'ordre.
gravel- Messages : 762
Date d'inscription : 22/10/2015
Age : 69
Localisation : Nantes
Re: aucune réponse dans cleanflight
par Mipel Mer 12 Déc 2018 - 13:00
De quelle manette parles-tu ?Geidjin a écrit:pareil aucune réaction dans cleanflight du coup je me demande si cela ne proviendrait il pas de la manette
_________________
Electrique :
Avions: clik R2 + mini-polyclub en indoor
Planeurs: Gem, Serenity et Typhoon
Hélicos: Trex 450-550
Drones: Wizard X220, Aurora 90 vol à vue+fpv
Thermique :
Extra 300 78'' avec DLE 35RA
Besoin d'infos ? https://opentx-doc.fr/ (co-admin du site avec LapinFou)
Mipel- Modérateur
- Messages : 3354
Date d'inscription : 08/06/2017
Age : 66
Localisation : 85 Vendée - Aéromodélisme Sablais -
Re: aucune réponse dans cleanflight
par Dehas Mer 12 Déc 2018 - 15:19

Dehas- Messages : 1046
Date d'inscription : 25/01/2017
Age : 67
Localisation : Saint Dié des Vosges
Re: aucune réponse dans cleanflight
par Invité Mer 12 Déc 2018 - 18:23
Invité- Invité
Re: aucune réponse dans cleanflight
par Dehas Mer 12 Déc 2018 - 18:53
Surtout Mets la en Betaflight, elle est conçu pour.
Pour tester un récepteur, il faut le binder avec ta radio.
Dehas- Messages : 1046
Date d'inscription : 25/01/2017
Age : 67
Localisation : Saint Dié des Vosges
Re: aucune réponse dans cleanflight
par Invité Mer 12 Déc 2018 - 19:27
Invité- Invité
Re: aucune réponse dans cleanflight
par Dehas Mer 12 Déc 2018 - 20:08
Il faut que tu supprime cette goutte.
Dehas- Messages : 1046
Date d'inscription : 25/01/2017
Age : 67
Localisation : Saint Dié des Vosges
Invité- Invité
Re: aucune réponse dans cleanflight
par Invité Mer 12 Déc 2018 - 20:48
Invité- Invité
Re: aucune réponse dans cleanflight
par Dehas Mer 12 Déc 2018 - 20:51
Dehas- Messages : 1046
Date d'inscription : 25/01/2017
Age : 67
Localisation : Saint Dié des Vosges
Re: aucune réponse dans cleanflight
par Invité Mer 12 Déc 2018 - 22:33
Invité- Invité
Re: aucune réponse dans cleanflight
par Invité Jeu 13 Déc 2018 - 20:40
Invité- Invité
Page 1 sur 2 • 1, 2
» Sonde courant FCS-40 ...aucune donnée
» CC3D & Betaflight aucune donnée du recepteur X8r avec Tanaris
» Horus et CleanFlight...
» cc3d vers cleanflight