







Le Guppy - Moto-planeur 1,7m
5 participants
Page 1 sur 1

Re: Le Guppy - Moto-planeur 1,7m
par Sacre100 Jeu 10 Déc 2015 - 15:52
Voilà, 3 précisions :
- j'ai deux servo pour la profondeur PRFd et PRFg (c'est un stab en T mais avec 2 volets indépendant)
- les AF sont des AF à lames avec 1 seul servo au centre sur le manche des gaz
- le crochet de remorquage est aussi sur le manche des gaz
Dans les entrées :
CAF = compensation AF.
CRO = crochet de remorquage.
Les AF à lame ont une zone de verrouillage en début de course, la courbe 2 permet de déverrouiller les AF sur un très faible mouvement du manche des gaz (5%). La courbe 1 fait de même mais pour la compensation à la profondeur, pas de compensation sur le début de la course du manche des gaz.
La courbe 3 fait que l'ouverture du crochet de remorquage se fait aussi sur le même déplacement très faible du manche des gaz. Ainsi, je peux ouvrir le crochet sans chercher des doigts un interrupteur, c'est très pratique en cas d'urgence.
[EDIT]
J'oubliais de préciser :
- que VG1 est utilisé pour la compensation à la profondeur et qu'elle est contrainte entre -30% et +30% (interrupteur L2 et L3, fonctions spéciales FS2 et FS3)
- que VG2 est utilisé pour le différentiel et qu'elle est contrainte entre 0% et 50% (interrupteur L4 et L5, fonction spéciale FS5 et FS6)
[/EDIT]
- j'ai deux servo pour la profondeur PRFd et PRFg (c'est un stab en T mais avec 2 volets indépendant)
- les AF sont des AF à lames avec 1 seul servo au centre sur le manche des gaz
- le crochet de remorquage est aussi sur le manche des gaz
Dans les entrées :
CAF = compensation AF.
CRO = crochet de remorquage.
Les AF à lame ont une zone de verrouillage en début de course, la courbe 2 permet de déverrouiller les AF sur un très faible mouvement du manche des gaz (5%). La courbe 1 fait de même mais pour la compensation à la profondeur, pas de compensation sur le début de la course du manche des gaz.
La courbe 3 fait que l'ouverture du crochet de remorquage se fait aussi sur le même déplacement très faible du manche des gaz. Ainsi, je peux ouvrir le crochet sans chercher des doigts un interrupteur, c'est très pratique en cas d'urgence.
[EDIT]
J'oubliais de préciser :
- que VG1 est utilisé pour la compensation à la profondeur et qu'elle est contrainte entre -30% et +30% (interrupteur L2 et L3, fonctions spéciales FS2 et FS3)
- que VG2 est utilisé pour le différentiel et qu'elle est contrainte entre 0% et 50% (interrupteur L4 et L5, fonction spéciale FS5 et FS6)
[/EDIT]
- Fichiers joints

- Janus.zip Vous n'avez pas la permission de télécharger les fichiers joints.(8 Ko) Téléchargé 11 fois

Sacre100-
 Messages : 1889
Messages : 1889
Date d'inscription : 30/11/2013
Age : 67
Localisation : Blonay - Suisse
Re: Le Guppy - Moto-planeur 1,7m
par Invité Jeu 10 Déc 2015 - 23:36
ENTREES
Sur les entrées je définie la commande des AF (ailerons utilisés en mode AF) et les entrées standards, Profondeur, direction, gaz et ailerons
DUAL RATE
L'inter SB permet de régler trois niveau de débattement, 100,70 et 50% du débattement max

SCRIPT LUA
2 types de script sont utilisé
Script de télémétrie
- guppy.lua et clguppy.lua
Les 2 fichiers sont à placer dans le répertoire SCRIPTS\TELEMETRY de la carte SD
Les 2 scripts seront affectés dans l'écran de télémétrie à l'écran 1 et l'écran 2

guppy.lua

clguppy.lua

Custom Scripts
Les fichiers sont à placer dans le répertoire SCRIPTS\MIXES de la carte SD
Les scripts seront affectés dans l'écran custom scripts

intcell.lua, percent.lua, cellvm et attal sont des scripts qui sont utilisés pour la gestion de l'alarme de la batterie du récepteur et l'affichage dans l’écran de télémétrie
vgtovoie.lua est utilisé pour utiliser les variables globales
Voie = VGx * Ratio * Entrée
Exemple compensation à piquer par rapport à la commande de Gaz
VOIE18 = VOIE3 Ratio(-100%) Décalage(-100%)
*= LUA5a Ratio(+70) Décalage(70%) Réglage Max en fonction d'un potentiomètre Ici LS
L'idée est de pouvoir régler en vol la compensation de pouvoir la sauvegarder dans une variable globale et de pouvoir récupérer la valeur de la variable comme si c’était la position du potentiomètre
COUPURE MOTEUR


coupure gaz avec sécurité et annonce vocale
Sur les entrées je définie la commande des AF (ailerons utilisés en mode AF) et les entrées standards, Profondeur, direction, gaz et ailerons
DUAL RATE
L'inter SB permet de régler trois niveau de débattement, 100,70 et 50% du débattement max
SCRIPT LUA
2 types de script sont utilisé
Script de télémétrie
- guppy.lua et clguppy.lua
Les 2 fichiers sont à placer dans le répertoire SCRIPTS\TELEMETRY de la carte SD
Les 2 scripts seront affectés dans l'écran de télémétrie à l'écran 1 et l'écran 2
guppy.lua
clguppy.lua
Custom Scripts
Les fichiers sont à placer dans le répertoire SCRIPTS\MIXES de la carte SD
Les scripts seront affectés dans l'écran custom scripts
intcell.lua, percent.lua, cellvm et attal sont des scripts qui sont utilisés pour la gestion de l'alarme de la batterie du récepteur et l'affichage dans l’écran de télémétrie
vgtovoie.lua est utilisé pour utiliser les variables globales
Voie = VGx * Ratio * Entrée
Exemple compensation à piquer par rapport à la commande de Gaz
VOIE18 = VOIE3 Ratio(-100%) Décalage(-100%)
*= LUA5a Ratio(+70) Décalage(70%) Réglage Max en fonction d'un potentiomètre Ici LS
L'idée est de pouvoir régler en vol la compensation de pouvoir la sauvegarder dans une variable globale et de pouvoir récupérer la valeur de la variable comme si c’était la position du potentiomètre
COUPURE MOTEUR
coupure gaz avec sécurité et annonce vocale
Invité- Invité
Re: Le Guppy - Moto-planeur 1,7m
par Invité Dim 20 Déc 2015 - 12:35
Voici une version modifiée.

S1 a retrouvé sa fonction initiale - volume
Le trim des Gaz est affecté au réglage de la compensation de la profondeur en fonction des Gaz
LS est affecté au réglage de la compensation de la profondeur par rapport aux AF
et S2 règle le débattement max des AF
Petite explication des compensations
j'ai voulu qu'il soit possible de régler des compensations en vol et de pouvoir les sauvegarder
1/ compensation des Gaz
Quant on met les Gaz, le planeur ou l'avion a tendance à cabrer, une petite compensation à piquer évite ce phénomène
La compensation est toujours active, le réglage se fait avec le trim des Gaz, il est possible de la désactiver grâce à l'inter SA
2/ compensation de la profondeur par rapport au AF
Quant on utilise les ailerons comme AF il est souvent utile de compenser à la profondeur, forcer le modèle à piquer
Cette compensation est toujours active
Si SD est en position haute (position normale) c'est la valeur sauvegardée qui est utilisée
Si SD est en position centrale, on utilise la valeur de LS (position réglage en vol). On peut sauvegardé la valeur en activant l'inter SH. La valeur de LS est sauvée dans VG4 est servira en position haute de SD
Si SD est en position basse, la compensation est désactivée
3/ AF
J'utilise les ailerons comme AF. Pour ralentir le planeur à l’atterrissage, RS me permet de relever ensemble les 2 ailerons
Les AF sont désactivés par défaut, ils sont commandés par SG
La position maximum du débattement est réglable en vol grâce à S2 et sauvegardée dans VG5
Si SG est en position haute, la commande est désactivée
Si SG est en position centrale, on utilise la valeur sauvegardée dans VG5
Si SG est en position basse, S2 est utilisé pour régler le débattement max. On peut sauvegardé la valeur en activant l'inter SH. La valeur de S2 est mise dans VG5 est servira en position milieu de SG
je détaillerais prochainement toute la programmation des 3 compensations
Je vous détaillerai aussi les scripts LUA
S1 a retrouvé sa fonction initiale - volume
Le trim des Gaz est affecté au réglage de la compensation de la profondeur en fonction des Gaz
LS est affecté au réglage de la compensation de la profondeur par rapport aux AF
et S2 règle le débattement max des AF
Petite explication des compensations
j'ai voulu qu'il soit possible de régler des compensations en vol et de pouvoir les sauvegarder
1/ compensation des Gaz
Quant on met les Gaz, le planeur ou l'avion a tendance à cabrer, une petite compensation à piquer évite ce phénomène
La compensation est toujours active, le réglage se fait avec le trim des Gaz, il est possible de la désactiver grâce à l'inter SA
2/ compensation de la profondeur par rapport au AF
Quant on utilise les ailerons comme AF il est souvent utile de compenser à la profondeur, forcer le modèle à piquer
Cette compensation est toujours active
Si SD est en position haute (position normale) c'est la valeur sauvegardée qui est utilisée
Si SD est en position centrale, on utilise la valeur de LS (position réglage en vol). On peut sauvegardé la valeur en activant l'inter SH. La valeur de LS est sauvée dans VG4 est servira en position haute de SD
Si SD est en position basse, la compensation est désactivée
3/ AF
J'utilise les ailerons comme AF. Pour ralentir le planeur à l’atterrissage, RS me permet de relever ensemble les 2 ailerons
Les AF sont désactivés par défaut, ils sont commandés par SG
La position maximum du débattement est réglable en vol grâce à S2 et sauvegardée dans VG5
Si SG est en position haute, la commande est désactivée
Si SG est en position centrale, on utilise la valeur sauvegardée dans VG5
Si SG est en position basse, S2 est utilisé pour régler le débattement max. On peut sauvegardé la valeur en activant l'inter SH. La valeur de S2 est mise dans VG5 est servira en position milieu de SG
je détaillerais prochainement toute la programmation des 3 compensations
Je vous détaillerai aussi les scripts LUA
- Fichiers joints
- TELEMETRY.zip (5 Ko) Téléchargé 5 fois
Dernière édition par jpg63 le Dim 20 Déc 2015 - 16:50, édité 2 fois
Invité- Invité
Re: Le Guppy - Moto-planeur 1,7m
par Invité Dim 20 Déc 2015 - 16:23
Différentiel d'aileron
Le différentiel est réglable avec l'inter SC
SC en haut (valeur par défaut) 30%
SC au milieu 45%
SC en bas 60%


Compensation GAZ
Mixage

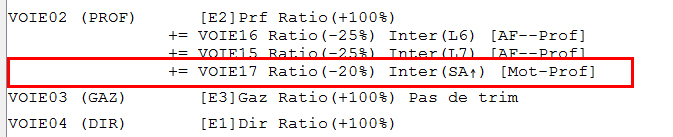
Fonctions spéciales

Le différentiel est réglable avec l'inter SC
SC en haut (valeur par défaut) 30%
SC au milieu 45%
SC en bas 60%
Compensation GAZ
Mixage
Fonctions spéciales
Invité- Invité
» Planeur RES
» Programation pour moto planeur
» Sortie pylone sur moto planeur
» commande Gaz-AF sur manche des GAZ pour moto-planeur
» Planeur Stellar
» Programation pour moto planeur
» Sortie pylone sur moto planeur
» commande Gaz-AF sur manche des GAZ pour moto-planeur
» Planeur Stellar
Page 1 sur 1
Permission de ce forum:
Vous ne pouvez pas répondre aux sujets dans ce forum