







conseil configuration opentx
2 participants
Page 1 sur 1

conseil configuration opentx
par Invité Dim 14 Mai 2017 - 20:27
Bonjour à tous
je débute dans la configuration de drone et en particulier sur la taranis X9D.
après avoir visionner plusieurs fois les vidéo de lapinfou, que je remercie au passage car cela m'a bien aider, j'ai esquisser une première configuration.
je vous l'a partage car j'aimerai avoir votre aide, vos remarques concernant des oublies ou des erreurs, histoire d'avoir quelque chose qui fonctionne bien.
je vous explique ce que j'ai fait :
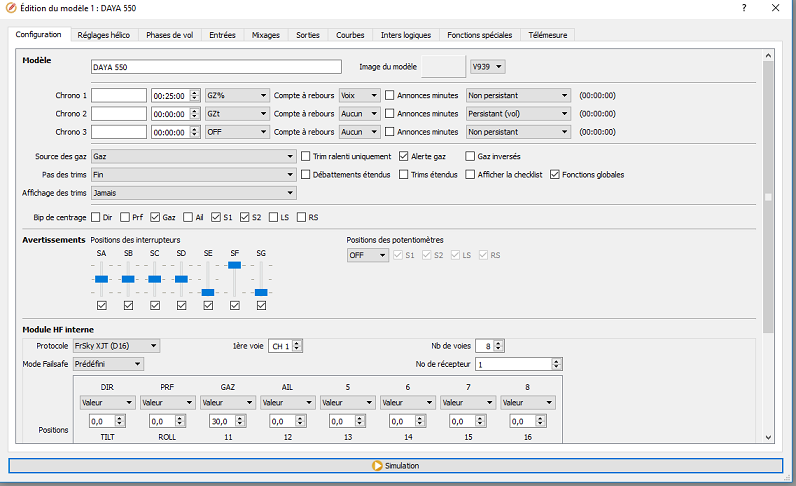
j'ai d'abord défini mes chrono et le failsafe ( j'ai défini la valeur des gaz à 30 de manière à ce que le drone ne tombe pas à pique mais se pose en douceur ) je ne sais pas si c'est
la meilleur configuration pour le failsafe ?
j'ai ensuite définit mes phases de vol ( pas compliqué pour cette partie ) j'ai appliqué un fondu de 0.2s en entrée de chaque phase pour une transition plus douce des servos
j'ai définit mes entrées, les 4 par défaut puis 2 entrées pour le roll et tilt de la nacelle je n'ai pas mis de trim sur les gazs car je suis en électrique
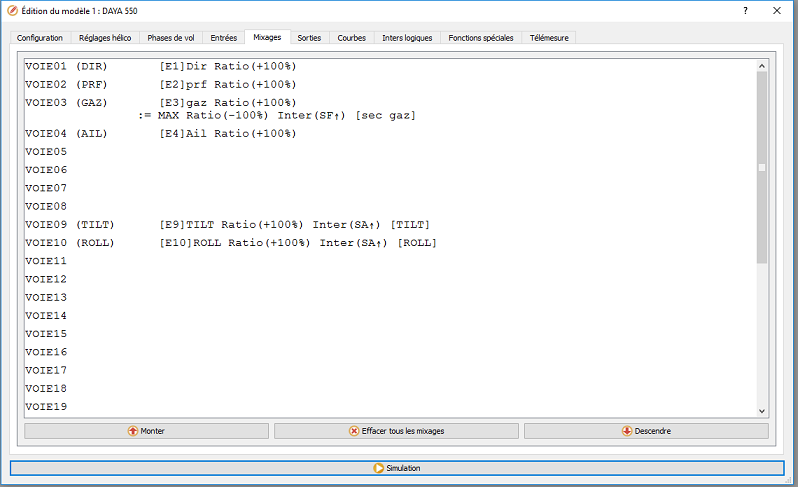
ensuite les mixage : sur la voie des gazs j'ai configuré une sécurité moteur avec l'interrupteur SF puis j'ai définit l'activation du roll et tilt avec l'interrupteur SA
j'ai définit mes interrupteurs logiques pour chaque phase de vol
et j'ai définit mes fonctions spéciales pour jouer les fichiers sons
voila ce que j'ai fait, j'attend vos retours et surtout vos conseils.
une petite question en plus, le contrôleur de vol est un pixhawk, j'ai bien définit les phase de vol sur la télécommande mais comment je fait pour dire au pixhawk que quand je
choisit la phase stationnaire sur la télécommande le pixhawk doit activer cette phase ?
j'ai mis mes captures d’écran en pièce jointe



je débute dans la configuration de drone et en particulier sur la taranis X9D.
après avoir visionner plusieurs fois les vidéo de lapinfou, que je remercie au passage car cela m'a bien aider, j'ai esquisser une première configuration.
je vous l'a partage car j'aimerai avoir votre aide, vos remarques concernant des oublies ou des erreurs, histoire d'avoir quelque chose qui fonctionne bien.
je vous explique ce que j'ai fait :
j'ai d'abord défini mes chrono et le failsafe ( j'ai défini la valeur des gaz à 30 de manière à ce que le drone ne tombe pas à pique mais se pose en douceur ) je ne sais pas si c'est
la meilleur configuration pour le failsafe ?
j'ai ensuite définit mes phases de vol ( pas compliqué pour cette partie ) j'ai appliqué un fondu de 0.2s en entrée de chaque phase pour une transition plus douce des servos
j'ai définit mes entrées, les 4 par défaut puis 2 entrées pour le roll et tilt de la nacelle je n'ai pas mis de trim sur les gazs car je suis en électrique
ensuite les mixage : sur la voie des gazs j'ai configuré une sécurité moteur avec l'interrupteur SF puis j'ai définit l'activation du roll et tilt avec l'interrupteur SA
j'ai définit mes interrupteurs logiques pour chaque phase de vol
et j'ai définit mes fonctions spéciales pour jouer les fichiers sons
voila ce que j'ai fait, j'attend vos retours et surtout vos conseils.
une petite question en plus, le contrôleur de vol est un pixhawk, j'ai bien définit les phase de vol sur la télécommande mais comment je fait pour dire au pixhawk que quand je
choisit la phase stationnaire sur la télécommande le pixhawk doit activer cette phase ?
j'ai mis mes captures d’écran en pièce jointe
Invité- Invité
Re: conseil configuration opentx
par Invité Dim 14 Mai 2017 - 20:28
les deux dernières captures d'écran de ma configuration


Invité- Invité
Re: conseil configuration opentx
par Alex Mer 24 Mai 2017 - 9:51
Salut !
Alors je n'ai pas tout regardé mais allons y progressivement.
Pour commencer ton FailSafe ; il faut mettre une valeur négative pour les gaz, avec une valeur de 30 si tu engages le FailSafe ton multi va faire une jolie montée vers les nuages. Une valeur de -10 assure un atterrissage en douceur mais après tout dépend des réglages de ton appareil... A toi de voir si c'est trop "lent" comme taux de descente.
Ensuite tes phases de vol, je ne comprend pas bien ce que tu cherches à faire avec la phase "décollage" et "atterrissage". C'est à mon avis dû, à un traduction, pas tout à fait parfaite, mais il faut bien comprendre que les "phases de vol" sont en faite des MODES DE VOL.
Par exemple ; un mode de vol entièrement manuel, un mode GPS, un mode GPS ou toutes voies sont à zéro (stationnaire), un mode FailSafe. Alors à moins que tu désires automatiser complétement le décollage et l'atterrissage de ton appareil je ne comprends pas le but de ces modes et je pense que tu as peut-être mal compris ce qu'étaient ces "phases de vol".
Ensuite concernant le Pixhawk, je ne connaît pas ce contrôleur de vol, mais il existe en principe un logiciel PC qui permet de paramétrer son contrôleur de vol afin de justement lui dire, avec cette voie fait ceci.
D'autres personnes du forum seront sûrement plus à même de répondre que moi mais il semblerait que le contrôleur fonctionne grâce au logicel qgroundcontrol
Tu auras sûrement plus de facilité à programmer ta taranis une fois que tu sera face à ce logiciel, je pense.
Alors je n'ai pas tout regardé mais allons y progressivement.
Pour commencer ton FailSafe ; il faut mettre une valeur négative pour les gaz, avec une valeur de 30 si tu engages le FailSafe ton multi va faire une jolie montée vers les nuages. Une valeur de -10 assure un atterrissage en douceur mais après tout dépend des réglages de ton appareil... A toi de voir si c'est trop "lent" comme taux de descente.
Ensuite tes phases de vol, je ne comprend pas bien ce que tu cherches à faire avec la phase "décollage" et "atterrissage". C'est à mon avis dû, à un traduction, pas tout à fait parfaite, mais il faut bien comprendre que les "phases de vol" sont en faite des MODES DE VOL.
Par exemple ; un mode de vol entièrement manuel, un mode GPS, un mode GPS ou toutes voies sont à zéro (stationnaire), un mode FailSafe. Alors à moins que tu désires automatiser complétement le décollage et l'atterrissage de ton appareil je ne comprends pas le but de ces modes et je pense que tu as peut-être mal compris ce qu'étaient ces "phases de vol".
Ensuite concernant le Pixhawk, je ne connaît pas ce contrôleur de vol, mais il existe en principe un logiciel PC qui permet de paramétrer son contrôleur de vol afin de justement lui dire, avec cette voie fait ceci.
D'autres personnes du forum seront sûrement plus à même de répondre que moi mais il semblerait que le contrôleur fonctionne grâce au logicel qgroundcontrol
Tu auras sûrement plus de facilité à programmer ta taranis une fois que tu sera face à ce logiciel, je pense.
Alex- Messages : 8
Date d'inscription : 04/09/2016
Age : 30
Localisation : Suisse
Re: conseil configuration opentx
par Invité Mer 24 Mai 2017 - 11:34
Bonjour Benoit,
D'abord il faudrait que tu apprennes à mettre tes images directement sur le forum au lieu d'en téléchargement. Cela éviterai aux intervenants de charger les images et d'encombrer leur disque dur.
Ensuite le failsafe... A quoi va t'il te servir. Si tu t'éloigne à plus de 2km, il va s'enclencher. le drone vas se poser n'importe où et est-ce que tu est sur que tu vas le retrouver ?
Sur les miens (F450 et F550), le failsafe me provoque un retour automatique au point de départ (RTH). C'est quand même plus sur.
Quand à un failsafe en cas de batterie basse, s'il est trop haut, c'est la chute assuré s'il n'y a plus assez de courant.
Bon maintenant je vais mieux voir tes images et les remettre en ligne.
D'abord il faudrait que tu apprennes à mettre tes images directement sur le forum au lieu d'en téléchargement. Cela éviterai aux intervenants de charger les images et d'encombrer leur disque dur.
Ensuite le failsafe... A quoi va t'il te servir. Si tu t'éloigne à plus de 2km, il va s'enclencher. le drone vas se poser n'importe où et est-ce que tu est sur que tu vas le retrouver ?
Sur les miens (F450 et F550), le failsafe me provoque un retour automatique au point de départ (RTH). C'est quand même plus sur.
Quand à un failsafe en cas de batterie basse, s'il est trop haut, c'est la chute assuré s'il n'y a plus assez de courant.
Bon maintenant je vais mieux voir tes images et les remettre en ligne.
Invité- Invité
Re: conseil configuration opentx
par Invité Mer 24 Mai 2017 - 11:57
d'abord merci de prendre le temps de répondre.
je suis désolé pour toute les images c'est pour ça que j'avais ouvert un autre sujet dans la partie configuration ( qui me semble la bonne partie du forum où poster) avec mon eeprom au format zip https://frskytaranis.forumactif.org/t5386-mon-eeprom-pour-quadcopter
ensuite sur ce fichier zip j'avais en effet supprimer le mode décollage et atterrissage qui en effet ne sert à rien.
si vous pouviez jeter un oeil dessus car je l'ai pas mal modifier. et entre temps j'irais modifier le failsafe pour le mettre en RTH.
je suis désolé pour toute les images c'est pour ça que j'avais ouvert un autre sujet dans la partie configuration ( qui me semble la bonne partie du forum où poster) avec mon eeprom au format zip https://frskytaranis.forumactif.org/t5386-mon-eeprom-pour-quadcopter
ensuite sur ce fichier zip j'avais en effet supprimer le mode décollage et atterrissage qui en effet ne sert à rien.
si vous pouviez jeter un oeil dessus car je l'ai pas mal modifier. et entre temps j'irais modifier le failsafe pour le mettre en RTH.
Invité- Invité
Re: conseil configuration opentx
par JohnLenine Mer 31 Mai 2017 - 15:12
Bonjour Benoit,
je te mets en fichier joint le .otx de mon hexa Tarot T680 Pro équipé d'une Pixhawk et d'une nacelle Quanum 2 axes. Il est prévu pour ma Horus X12S sous OpenTX 2.2.0 mais est facilement transposable pour tes besoin.
J'ai fait un petit montage (APM MavLink to FrSky X8R S.Port converter) permettant de convertir les données Mavlink au format SmartPort de Frsky et ainsi récupérer sur ma Horus (et précédemment sur ma Taranis) toutes les données de télémesure de la Pixhawk. Ca permet de s'affranchir de Mission Planner (pour peu qu'on ait pas de vol autonome à effectuer bien sûr) tout en gérant les alertes.
- Failsafe de récepteur :'Pas d'impulsion' (c'est la Pixhawk qui fait le taf)
- 4 modes de vol principaux (Stabilize, Altitude Hold, Loiter, Return To Launch) commutables par les switches SE (3 pos.) et SF (2 pos.)
- mode Auto : switch SC
- modes Normal/Simple/Super Simple : switch SB (3 pos.)
- volume audio : pot S1
- tilt de la nacelle : pot S2
- annonce vocale du courant consommé (mAh) depuis le début du vol : switch monostable SH
- écriture des logs Mavlink dans la SD card de la Horus quand les gaz sont >= 10%
Reste à implémenter les alertes tension et courant consommé (je sais, ça prends 10mn mais bon... )
)
A ta disposition pour tout complément d'information.
je te mets en fichier joint le .otx de mon hexa Tarot T680 Pro équipé d'une Pixhawk et d'une nacelle Quanum 2 axes. Il est prévu pour ma Horus X12S sous OpenTX 2.2.0 mais est facilement transposable pour tes besoin.
J'ai fait un petit montage (APM MavLink to FrSky X8R S.Port converter) permettant de convertir les données Mavlink au format SmartPort de Frsky et ainsi récupérer sur ma Horus (et précédemment sur ma Taranis) toutes les données de télémesure de la Pixhawk. Ca permet de s'affranchir de Mission Planner (pour peu qu'on ait pas de vol autonome à effectuer bien sûr) tout en gérant les alertes.
- Failsafe de récepteur :'Pas d'impulsion' (c'est la Pixhawk qui fait le taf)
- 4 modes de vol principaux (Stabilize, Altitude Hold, Loiter, Return To Launch) commutables par les switches SE (3 pos.) et SF (2 pos.)
- mode Auto : switch SC
- modes Normal/Simple/Super Simple : switch SB (3 pos.)
- volume audio : pot S1
- tilt de la nacelle : pot S2
- annonce vocale du courant consommé (mAh) depuis le début du vol : switch monostable SH
- écriture des logs Mavlink dans la SD card de la Horus quand les gaz sont >= 10%
Reste à implémenter les alertes tension et courant consommé (je sais, ça prends 10mn mais bon...
A ta disposition pour tout complément d'information.
- Fichiers joints

- T680.zip Fichier .otx pour Horus X12S sous OpenTX 2.2.0Vous n'avez pas la permission de télécharger les fichiers joints.(2 Ko) Téléchargé 14 fois
JohnLenine-
 Messages : 39
Messages : 39
Date d'inscription : 26/03/2014
Age : 66
Localisation : Sucy en Brie (94), Saint-Mathieu (87) -

Re: conseil configuration opentx
par Invité Mer 31 Mai 2017 - 17:58
merci beaucoup pour ta réponse, je vais étudier cela et je reviens vers toi si j'ai d'autre questions.
par contre comment je lis un fichier OTX ? je colle le dossier MODELS et RADIO dans la télécommande ?
par contre comment je lis un fichier OTX ? je colle le dossier MODELS et RADIO dans la télécommande ?
Invité- Invité
Re: conseil configuration opentx
par JohnLenine Mer 31 Mai 2017 - 20:28
OTX a remplacé le format EEPE depuis la v2.1.0 de Companion. Si ta version de Companion est => à 2.1, tu fais Fichier/Ouvrir/le chemin qui va bien pour T680.otx et c'est tout !
Et sinon... met donc à jour Companion et ta Taranis en 2.2.0 maintenant qu'il y a une release stable et tu verras, ça simplifiera le dialogue avec les copains et le support éventuel
Et sinon... met donc à jour Companion et ta Taranis en 2.2.0 maintenant qu'il y a une release stable et tu verras, ça simplifiera le dialogue avec les copains et le support éventuel
JohnLenine- Messages : 39
Date d'inscription : 26/03/2014
Age : 66
Localisation : Sucy en Brie (94), Saint-Mathieu (87) -
Re: conseil configuration opentx
par Invité Jeu 1 Juin 2017 - 9:06
petite question,
dans les inter logique les chiffres que tu a mis pour les inter 8 à 11 correspondent à quoi ?
dans les inter logique les chiffres que tu a mis pour les inter 8 à 11 correspondent à quoi ?
Invité- Invité
Re: conseil configuration opentx
par JohnLenine Jeu 1 Juin 2017 - 10:34
Ce sont les valeurs correspondant aux 4 modes de vol de la Pixhawk que j'utilise. Je récupére la valeur du "capteur" Mode (voir l'onglet Télémesure pour tous les "capteurs" intégrés à la carte), ce qui permet de connaître en temps réel le mode de vol actif.
JohnLenine- Messages : 39
Date d'inscription : 26/03/2014
Age : 66
Localisation : Sucy en Brie (94), Saint-Mathieu (87) -
Re: conseil configuration opentx
par Invité Jeu 1 Juin 2017 - 10:46
d'accord c'est ce que je pensais.
et pour récupérer la télémetrie tu a simplement suivi le montage où il y a quelque chose à programmer sur le TEENSY3.2
et pour récupérer la télémetrie tu a simplement suivi le montage où il y a quelque chose à programmer sur le TEENSY3.2
Invité- Invité
Re: conseil configuration opentx
par JohnLenine Jeu 1 Juin 2017 - 13:47
Il faut bien évidemment programmer la Teensy.
https://github.com/athertop/MavLink_FrSkySPort/wiki
https://github.com/athertop/MavLink_FrSkySPort/wiki
JohnLenine- Messages : 39
Date d'inscription : 26/03/2014
Age : 66
Localisation : Sucy en Brie (94), Saint-Mathieu (87) -
» Configuration OpenTX 2.1.3
» Redundancy bus 16 voies, 2 x4r et horus opentx configuration
» Configuration Opentx + Align RCE-G600 + Vbar
» bug sur simulateur opentx + precision de capteur sur configuration smart port / converter / px4
» Configuration de la radio pour le gyro Aura 8 sur le RV-8 de Premier Aircraft - Frsky OpenTx 2.3.14
» Redundancy bus 16 voies, 2 x4r et horus opentx configuration
» Configuration Opentx + Align RCE-G600 + Vbar
» bug sur simulateur opentx + precision de capteur sur configuration smart port / converter / px4
» Configuration de la radio pour le gyro Aura 8 sur le RV-8 de Premier Aircraft - Frsky OpenTx 2.3.14
Page 1 sur 1
Permission de ce forum:
Vous ne pouvez pas répondre aux sujets dans ce forum