







ArduIMU V3 + GPS + S.Port
Page 1 sur 2 • 1, 2 
ArduIMU V3 + GPS + S.Port
par Sacre100 Mar 7 Oct 2014 - 23:47
Ayant un ArduIMU V3 qui trainait dans un tiroir, je me suis dit : pourquoi ne pas l'utiliser pour transmettre les données de l'accéléromètre à la télémétrie de la Taranis.
L'idée est d'afficher un horizon artificiel sur la Taranis et aussi d'avoir les données du GPS plus fréquemment qu'avec le GPS de Frsky
J'ai regardé pour utiliser et adapter openxsensor mais la chose est trop sophistiquée pour moi alors j'ai développé ma propre interface S.Port
Pour cela, j'ai utilisé SoftSerial pour le protocole S.Port et après trois petites soirées à tâtonner, je suis arrivé à faire fonctionner la chose.
En fin de compte, avec SoftSerial, ce n'est pas très compliqué.
[edit 08.10.14]
Avec la nouvelle librairie SoftSerial que j'ai trouvé sur le net, la connexion se fait sur une seule pin, la 8 (D8) ou la 9 (PWM0). La pin 10 (PWM1) ne peut pas être utilisée à cause d'un conflit avec SPI sauf erreur.
[/edit 08.10.14]
[edit 12.10.14]
J'ai abandonné la librairie FreeIMU qui me posait problème avec la librairie FastSerial alors j'ai repris un bout de code que j'avais développé pour avoir l'horizon artificiel dans l'OSD Remzibi. Et comme ça marche bien, j'ai garadé cette sortie pour l'OSD Remzibi ainsi on peut avoir l'horizon artificiel dans l'OSD et sur la Taranis en même temps.
[/edit 12.10.14]
Vous trouverez la chose ici avec le script LUA : http://quetzal.homepage.bluewin.ch/ArduIMU_SPort.zip (version du 12.10.14)
Actuellement, le code pour l'ArduIMU V3 :
- Utilise la pin 9 (PWM0) pour le protocole Frsky, la pin 8 (D8) est utilisé pour le reset de l'IMU
- Transmet les données GPS à la Taranis (latitude, longitude, cap GPS, vitesse sol & altitude GPS)
- Transmet Yaw (cap boussole), Pitch et Roll à la Taranis (dans accX, accY, accZ en attendant de les trois variable Yaw, Pitch & Roll soient ajoutées à la télémétrie d'OpenTx
- Transmet les données GPS à Remzibi (message $A, ...)
- Transmet l'horizon artificiel à Remzibi (message $I, ... avec Pitch & Roll)
- Transmet une "bille" artificiel à Remzibi (série de message $M, ...)
NB. La sortie Remzibi peut être désactivé en modifiant #define USE_REMZIBI 1 par #define USE_REMZIBI 0
Les résultats ne sont pas encore parfait mais j'obtiens déjà des données sur ma Taranis et je suis bien content.
[edit 15.10.14]
J'obtiens maintenant l'affichage animé sur la Taranis. J'étais parti sur un horizon artificiel mais j'ai changé de fusil d'épaule et j'ai développé une silhouette de planeur qui s’oriente en suivant la position angulaire de l'aéronef. Je pense que c'est mieux pour un modéliste qui a l'habitude de voir son engin de l'extérieur.
J'ai aussi pratiquement fini le programme pour l'ArduIMU qui transmet maintenant les trois positions angulaires yaw, pitch et roll, et les données GPS latitude, longitude, vitesse sol, cap, altitude, date et heure. Les données de l'IMU sont transmises 10 fois par secondes (10hz) et celles du GPS en du paramétrage du GPS mais au maximum 10 fois par secondes (10Hz). Dans les logs, les données semblent correctes, reste à faire en voiture pour avoir des logs réalistes.
Voilà ce que cela donne en image.
Et voici le banc d'essai

[/edit 15.10.14]
[edit 18.10.14]
J'ai modifiée la silhouette de l'appareil, c'est mieux je pense.
J'ai programmé l'altimètre, le speedomètre ainsi que fait plusieurs corrections de bug.
[/edit 18.10.14]
[edit 21.10.14]
J'ai programmé le compas, la distance et la flèche "Return to Home" ainsi que quelques corrections de bug.
[/edit 21.10.14]
Next steps :
Améliorer la silhouette affiché par le LUACompléter le script avec l'altitude, la vitesse, la flèche return to home et d'autres données à définir- Améliorer le reset via la pin 8 (D8)
- Tester, tester et encore tester
Dernière édition par Sacre100 le Sam 22 Aoû 2015 - 10:23, édité 8 fois

Sacre100-
 Messages : 1889
Messages : 1889
Date d'inscription : 30/11/2013
Age : 67
Localisation : Blonay - Suisse
Re: ArduIMU V3 + GPS + S.Port
par .AleX. Mer 8 Oct 2014 - 6:17

.AleX.- Messages : 1459
Date d'inscription : 24/11/2013
Localisation : Clermont-Fd(63) ou parfois Annecy(74)
Re: ArduIMU V3 + GPS + S.Port
par Sacre100 Mer 8 Oct 2014 - 9:45

Sacre100- Messages : 1889
Date d'inscription : 30/11/2013
Age : 67
Localisation : Blonay - Suisse
Re: ArduIMU V3 + GPS + S.Port
par Sacre100 Mer 8 Oct 2014 - 22:32
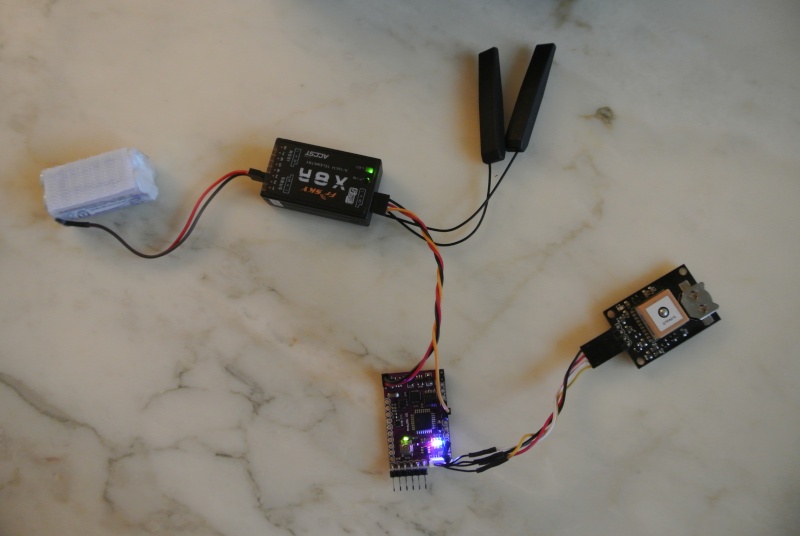
Avec la nouvelle librairie SoftSerial que j'ai trouvé sur le net, cela fonctionne très bien sans le petit adaptateur que j'avais employé hier soir, trop cool.
Le premier message a été adapté et le zip aussi.
Voilà le montage :

Sacre100- Messages : 1889
Date d'inscription : 30/11/2013
Age : 67
Localisation : Blonay - Suisse
Re: ArduIMU V3 + GPS + S.Port
par Sacre100 Ven 10 Oct 2014 - 9:11
Les cordonnées ont l'air assez bonnes tout comme le cap et la distance mais j'ai encore quelques soucis avec la vitesse et l'altitude.
Le rafraichissement du GPS est fait 10 fois par secondes (10Hz) ce qui est nettement mieux que le GPS de Frsky.

Sacre100- Messages : 1889
Date d'inscription : 30/11/2013
Age : 67
Localisation : Blonay - Suisse
Re: ArduIMU V3 + GPS + S.Port
par Totof1965 Ven 10 Oct 2014 - 10:21
_________________
Premier batch de Taranis, je suis conquis
Soyez sympa présentez vous, c'est plus cool : ICI
http://www.frskytaranis.fr

Totof1965- Administrateur
- Messages : 941
Date d'inscription : 23/07/2013
Age : 59
Localisation : Blain
Re: ArduIMU V3 + GPS + S.Port
par Sacre100 Ven 10 Oct 2014 - 13:22
Totof1965 a écrit:Bravo c'est du bon boulot !
Merci mais je ne suis pas sorti de l'auberge car si avec FreeIMU seul ou le GPS seul ça marche, quand j'assemble les deux, ça bug lors de la compilation (problème entre SoftwareSerial et HardwareSerial)
J'ai repris un autre morceau de code pour l'IMU que j'avais utilisé pour avoir l'horizon artificiel dans l'OSD Remzibi. Il marche avec le GPS mais ce code, c'est l'horreur tellement il a été écrit à l'arrache. Si je ne trouve pas de solution, je ferai avec mais bof, bof.
A terme mon idée, c'est d'avoir l'horizon artificiel, l'altitude, la vitesse, la boussole et la flèche pour rentrer à la maison tout comme sur un OSD.
C'est pour tenter de faire du vol aux instruments en regardant l'écran de la Taranis, ça doit être super casse-gueule mais ça doit être marrant aussi.
C'est pourquoi j'ai demande sur Github l'ajout des champs Yaw, Pitch & Roll dans la télémétrie. En attendant, je vais utiliser AccX, AxccY & AccZ pour mes développements.
Sacre100- Messages : 1889
Date d'inscription : 30/11/2013
Age : 67
Localisation : Blonay - Suisse
Re: ArduIMU V3 + GPS + S.Port
par Totof1965 Ven 10 Oct 2014 - 15:16
_________________
Premier batch de Taranis, je suis conquis
Soyez sympa présentez vous, c'est plus cool : ICI
http://www.frskytaranis.fr
Totof1965- Administrateur
- Messages : 941
Date d'inscription : 23/07/2013
Age : 59
Localisation : Blain
Re: ArduIMU V3 + GPS + S.Port
par Sacre100 Dim 12 Oct 2014 - 12:01
Suite à mon problème d'incompatibilité entre les librairies FastSerial et FreeIMU, j'ai repris le code que j'avais développé pour avoir l'horizon artificiel dans l'OSD Remzibi et je l'ai adapté pour lui ajouter la sortie du protocole S.Port.
Comme ça, je vais pouvoir avoir l'horizon artificiel sur la Taranis et dans l'OSD Remzibi, c'est inutile mais cool !!!...
Il me reste à développer le script LUA pour avoir un résultat concret de ces quelques jours de programmation.
Je me suis fait un banc d'essai, c'est quand même plus pratique pour manipuler l'IMU penant les tests.

Sacre100- Messages : 1889
Date d'inscription : 30/11/2013
Age : 67
Localisation : Blonay - Suisse
Re: ArduIMU V3 + GPS + S.Port
par .AleX. Dim 12 Oct 2014 - 16:27
Sacre100 a écrit:
Comme ça, je vais pouvoir avoir l'horizon artificiel sur la Taranis [.........], c'est inutile mais cool !!!...
Il me reste à développer le script LUA pour avoir un résultat concret de ces quelques jours de programmation.
Ben si c'est assez réactif, ça peut avoir une utilité...
Si tu as les infos de pitch/roll/yaw avec assez de réactivité, on peut par exemple imaginer un mode spécifique pour les débutant qui limite les débattements si un angle dépasse 45°
C'est ce qu'on appelle recherche fondamentale, pas forcément applicable pendant que tu fais tes essais, mais qui peut avoir un impact à l'avenir
.AleX.- Messages : 1459
Date d'inscription : 24/11/2013
Localisation : Clermont-Fd(63) ou parfois Annecy(74)
Sacre100- Messages : 1889
Date d'inscription : 30/11/2013
Age : 67
Localisation : Blonay - Suisse
Re: ArduIMU V3 + GPS + S.Port
par Invité Mar 14 Oct 2014 - 21:54
https://store.3drobotics.com/products/arduimu-v3 y as "juste besoin de se truc la un fer a souder 2 ou 3 bout de fils ? comment j envoie le programme a l atmega ? faut un programmateur ou un logiciel specifique ? avec quelle liaison entre le pc et l atmega ?
Invité- Invité
Re: ArduIMU V3 + GPS + S.Port
par nicephore Mer 15 Oct 2014 - 8:18
Sacre100: Bravo sur boulot.
sengir39: pour transférer le programme en arduino vas voir dans la section download de http://www.arduino.cc/
@+
nicephore- Messages : 612
Date d'inscription : 14/06/2014
Localisation : Créteil
Re: ArduIMU V3 + GPS + S.Port
par Sacre100 Mer 15 Oct 2014 - 10:47
sengir39 a écrit:heu ça m intéresse ton truc là mais j y connais rien et pour l horizon artificielle j ai eu la meme pensée qu'Alex ....tu peux mettre en ligne ton lua stp ?
https://store.3drobotics.com/products/arduimu-v3 y as "juste besoin de se truc la un fer a souder 2 ou 3 bout de fils ? comment j envoie le programme a l atmega ? faut un programmateur ou un logiciel specifique ? avec quelle liaison entre le pc et l atmega ?
nicephore a écrit:Bonjour,
Sacre100: Bravo sur boulot.
sengir39: pour transférer le programme en arduino vas voir dans la section download de http://www.arduino.cc/
@+
@Nicophore : Merci mais ce n'est pas encore fini, loin de là.
Côté ArdiuIMU, il me reste à tester l'altitude, la date et l'heure, le reste fonctionne et j'ai assez bien réparti la charge pour avoir un affichage sans trop d'à coup. Il faut aussi que je voie à quelque fréquence rafraichir les données GPS. 1Hz, c'est pas assez, nos engin volent trop vite, 10Hz, ça semble saturer alors je vais tester avec 5Hz (encore quelques tours en voiture à faire)
Côté LUA, j'ai tout à faire car le code que j'ai repris pour l'affichage est tout faux. Et puis, j'hésite entre un horizon artificiel ou une silhouette animée de l'appareil. S'il me semble que dans un OSD, l'horizon artificiel est tout à fait adéquat, je me dis que pour un pilote RC, voir son engin de l'extérieur sera plus naturel. Je ne sais pas ce que vous en pensez.
@sengir39 : Voici ma shopping list :
- L'arduIMU que j'ai pris chez SparkFun https://www.sparkfun.com/products/11055 (celle que j'avais eu de 3drobotics n'a jamais fonctionné et j'avais vu qu'on était plusieurs dans ce cas)
- Un GPS Drotek : http://www.drotek.fr/shop/fr/home/90-gps-pa6c-llc.html (j'aime bien ce GPS car on peu changer facilement l'accus, c'est utile quand on utilise pas le GPS pendant plusieurs mois)
- Un cable FTDI pour transférer le programme sur l'ArduiIMU et aussi pour connecter le GPS : https://www.sparkfun.com/products/11055
- Un jeu de câble 10cm pour faire ses branchements : http://www.drotek.fr/shop/fr/home/109-cable-dual-femelle-24awg.html (10cm, ça suffit, 20cm ça va bien aussi, c'est égal)
- Quelques connecteurs 3, 4 & 5 broches femelles et deux rangées de 40 broches mâles (une droites et une courbées), c'est utile pour les connexions : http://www.drotek.fr/shop/fr/75-connecteurs
Et aussi :
- L'environnement de développement Arduino IDE : http://arduino.cc/en/Main/Software
- Et aussi pour paramétrer le GPS, le programme MiniGPS que j'avais eu je ne sais plus où
A noter :
- L'ArduIMU V3 est plutôt cher par rapport à ce que l'on peut trouver par ailleurs, surtout si l'on assemble soi même des composants autour d'un Arduino. Mais ça demande un peu plus de savoir faire qu'avec l'ArduIMU.
- J'ai pas mal galéré au début, je n'avais aucune connaissance des Arduino et des GPS, et il m'a fallu surmonter pas mal de difficultés mais, on y arrive avec quelques (pas mal en fait) nuits blanches.
- Financièrement, ben, avec les erreurs que j'ai fait, la carte de crédit a fait un peu la gueule mais elle ne m'en veut pas trop
Sacre100- Messages : 1889
Date d'inscription : 30/11/2013
Age : 67
Localisation : Blonay - Suisse
Re: ArduIMU V3 + GPS + S.Port
par Sacre100 Mer 15 Oct 2014 - 22:48
Côté LUA, j'ai fait un prototype de planeur "artificiel", ça me plait bien même si c'est vraiment un premier jet. Il va falloir que je travaille la chose pour obtenir quelque chose de visuellement bien dans un carré de 30x30 pixels.
Les sources avec l'ébauche de script LUA sont là : http://quetzal.homepage.bluewin.ch/ArduIMU_SPort.zip
Et voilà la vidéo de ce soir.
Sacre100- Messages : 1889
Date d'inscription : 30/11/2013
Age : 67
Localisation : Blonay - Suisse
.AleX.- Messages : 1459
Date d'inscription : 24/11/2013
Localisation : Clermont-Fd(63) ou parfois Annecy(74)
Re: ArduIMU V3 + GPS + S.Port
par nicephore Jeu 16 Oct 2014 - 8:31
nicephore- Messages : 612
Date d'inscription : 14/06/2014
Localisation : Créteil
Re: ArduIMU V3 + GPS + S.Port
par Sacre100 Jeu 16 Oct 2014 - 9:02
Pour ma part, si vous regardez le code qui affiche le planeur, on voit bien que c'est peanuts par rapport à ce qu'ils on fait.
Bonne journée, Marco.
- Code:
local function drawPlane()
sinPitch = math.sin(math.rad(getValue("accy")))
cosPitch = math.cos(math.rad(getValue("accy")))
sinRoll = math.sin(math.rad(getValue("accz")))
cosRoll = math.cos(math.rad(getValue("accz")))
for index, point in pairs(planePoint) do
projPoint[index][1] = math.floor(point[1] * cosRoll - point[2] * sinRoll + 0.5)
projPoint[index][2] = math.floor((point[1] * sinRoll + point[2] * cosRoll) * cosPitch + point[3] * sinPitch + 0.5)
end
lcd.drawRectangle(75, 0, 64, 64, SOLID, 2)
for index, point in pairs(planeLine) do
i1 = point[1]
i2 = point[2]
lcd.drawLine (106 + projPoint[i1][1], 32 + projPoint[i1][2], 106 + projPoint[i2][1], 32 + projPoint[i2][2], SOLID, 2)
end
end
Sacre100- Messages : 1889
Date d'inscription : 30/11/2013
Age : 67
Localisation : Blonay - Suisse
Re: ArduIMU V3 + GPS + S.Port
par Sacre100 Sam 18 Oct 2014 - 23:59
J'ai aussi corrigé un bug dans le décodage des messages du GPS. Je ne m'en étais jamais aperçu mais les coordonnées GPS étaient fausses. Maintenant, c'est bon.
Et puis j'ai programmé l'altimètre et le speedomètre, ça donne bien je crois. Voici un courte vidéo de la chose dans le simulateur. En la regardant, je me suis aperçu d'un petit bug sur la vitesse, c'est corrigé dans le zip.
Sacre100- Messages : 1889
Date d'inscription : 30/11/2013
Age : 67
Localisation : Blonay - Suisse
Re: ArduIMU V3 + GPS + S.Port
par Sacre100 Dim 19 Oct 2014 - 19:34
On a aussi constaté que la vitesse était fausse, j'avais pensé que tout était en métrique mais ce n'est pas le cas pour la vitesse qui est en noeud. Vite corrigé par une multiplication par 1.8, ce sera bon pour les prochains essais.
Il me reste à faire et tester le "Return to Home" et si ça marche bien, tenter l'aventure du pilotage en regardant l'écran de la Taranis.
Sacre100- Messages : 1889
Date d'inscription : 30/11/2013
Age : 67
Localisation : Blonay - Suisse
Re: ArduIMU V3 + GPS + S.Port
par Sacre100 Mar 21 Oct 2014 - 9:56
Dites-moi ce que vous en pensez et si selon vous, il manque des informations sachant que l'idée, c'est de pouvoir se sortir d'un mauvais pas quand on perd son appareil de vue.

Sacre100- Messages : 1889
Date d'inscription : 30/11/2013
Age : 67
Localisation : Blonay - Suisse
Re: ArduIMU V3 + GPS + S.Port
par .AleX. Mar 21 Oct 2014 - 10:18

Pour aller plus loin, tu peux faire une variante pour afficher un horizon plutôt qu'une silhouette ?
L'affichage d'une maquette qui bouge devant un horizon fixe est une normalisation 'à la russe' qui n'existe plus :p
Pour le RTH, tu peux t'inspirer de l'afficheur d'un ADF...

Ou si tu veux aller plus loin, d'un HSI qui affiche HDG (cap) ADF, VOR/LOC :p

ADF = Automatic Direction Finder, l'un des premiers instruments de navigation, une aiguille pointe dans la direction de la balise dont on à sélectionné la fréquence.
VOR/LOC = VHF Omnidirectionnal Range : une balise est située 'quelque part', on sélectionne sa fréquence, et un cap "virtuel" partant de cette balise. L'afficheur propose une barre (barre de tendance) qui indique si on est à droite ou à gauche de cette ligne virtuelle et si on va vers (TO) la balise ou si l'on s'en éloigne (From) Le LOC c'est le même principe, mais il est situé dans l'axe de la piste.
.AleX.- Messages : 1459
Date d'inscription : 24/11/2013
Localisation : Clermont-Fd(63) ou parfois Annecy(74)
Re: ArduIMU V3 + GPS + S.Port
par Sacre100 Mar 21 Oct 2014 - 12:20
Pour l'instant, je vais débugger tout ça et aussi apprendre à m'en servir avec un copain en double commande, c'est moins risqué.
Voici en vidéo ce que cela donne.
Sacre100- Messages : 1889
Date d'inscription : 30/11/2013
Age : 67
Localisation : Blonay - Suisse
Re: ArduIMU V3 + GPS + S.Port
par LapinFou Mar 21 Oct 2014 - 12:54

_________________
Pas de support par MP !! Pour garder l'esprit communautaire, on partage tout sur le forum.


Maintenant que vous avez tout lu, vous pouvez poser vos questions !
OpenTX is user friendly!!! It's just selective about who its friends are....

LapinFou- Administrateur
- Messages : 16992
Date d'inscription : 09/09/2014
Age : 49
Localisation : Falaise -

Re: ArduIMU V3 + GPS + S.Port
par Sacre100 Mer 29 Oct 2014 - 12:48
Vitesse et distance fonctionnent très bien et sont parfaitement lisibles. L'altitude aussi et en plus, on distingue facilement si l'on est en train de monter ou descendre. Pareil pour la flèche indiquant le direction à prendre pour revenir vers soi mais je vais peut être la retourner de 180° de manière à ce qu'elle pointe vers moi lorsque l'appareil se rapproche, c'est peut-être plus naturel. La boussole c'est bien aussi mais sa lisibilité n'est pas optimale, facile à améliorer, je pense. Le but étant surtout de se rendre compte si l'on vole en ligne droite ou pas.
Pour la silhouette de l'appareil, il faut que j'améliore son affichage, c'est pas encore ça à mon avis. Peut-être qu'un horizon artificiel serait mieux que cette silhouette, je vais tester ça aussi.
Ceci étant dit, j'avoue ne pas avoir osé tenter le pilotage aux instruments. Je crois que c'est un peu tôt mais c'était limite. Encore quelques améliorations, de bonnes conditions et ça devrait le faire.
Sacre100- Messages : 1889
Date d'inscription : 30/11/2013
Age : 67
Localisation : Blonay - Suisse
Page 1 sur 2 • 1, 2
» GPS et s-port
» Vario H avec X6R + TARANIS
» X8R et 3GX sur port Sbus
» CAPTEUR VIA LE S/PORT