







Décodage SPORT depuis la sortie Module Externe
Page 1 sur 2 • 1, 2 
Décodage SPORT depuis la sortie Module Externe
par Invité Mar 3 Fév 2015 - 12:42
L'idée finale ( celle de Nicephore) était de récuperer les données de télémetrie pour actionner au sol une antenne pour suivre le modèle
sur la sortie module, on alimente et récupere les données de télémetrie
module -- > Teensy 3.1 --> mini tx 433
un peut plus loin
mini recepteur 433 -- Arduino --> servo pour orienté les antennes
Cette première partie ne traite que la récupération des données sur la radio
voici une ébauche de code qui permet la récupération des données et qui peut servir a plein d'autres choses.
- Code:
#define SPORT Serial1
#define SPORTEvent serialEvent1
int led = 13;
int buf[25];
int voie[18];
int memread;
int cpt;
int ser;
void setup() {
pinMode(led, OUTPUT); // led de controle utiliser sur une réception SPORT
SPORT.begin(57600, SERIAL_8N1_RXINV_TXINV); // activation de la liaison SPORT
Serial.begin(115200); // activation de la sortie serie pour le debug
cpt = 0 ;
memread = 255;
}
void loop() {
delay(20); // un petit delay a ajuster selon ce que l'on fait dans la boucle principale
}
void SPORTEvent() { // reception de donnée sur la ligne SPORT
digitalWrite(led, HIGH); // on alume la led :)
while ( SPORT.available() ) { // tant qu'un octet arrive sur le SPORT
int val = SPORT.read();
if ( val == 0x7E ) {
if (cpt > 2){
int id = buf[3] + (buf[4] *256);
Serial.print(cpt,DEC);
Serial.print("id:");
if ( id == 0x100 ){Serial.print("ALTITUDE ");}
if ( id == 0x110 ){Serial.print("VARIO ");}
if ( id == 0x200 ){Serial.print("COURRANT ");}
if ( id == 0x300 ){Serial.print("TENSIONS ");}
if ( id == 0x400 ){Serial.print("TEMP1 ");}
if ( id == 0x410 ){Serial.print("TEMP2 ");}
if ( id == 0x500 ){Serial.print("RMP ");}
if ( id == 0x800 ){Serial.print("LAT-LON ");}
if ( id == 0x820 ){Serial.print("GPS-ALT ");}
if ( id == 0x830 ){Serial.print("GPS-SPEED");}
if ( id == 0x840 ){Serial.print("HEADING ");}
if ( id == 0xF101){Serial.print("RSSI ");}
if ( id == 0xF104){Serial.print("BAT-RADIO");}
if ( id == 0xF105){Serial.print("SWR ");}
Serial.print(",");
Serial.print(id,HEX);
Serial.print(" ");
for(int x = 5; x < cpt ; x++ ){
Serial.print(buf[x],HEX);
Serial.print(",");
}
Serial.println();
}
cpt = 0;
}
if ( memread == 0x7D){
buf[cpt] = val ^ 0x20 ;
cpt += 1 ;
}else if ( val != 0x7D ){
buf[cpt] = val;
cpt += 1 ;
}
memread = val;
} // fin du while
digitalWrite(led, LOW); //on eteind la led
}
En l'état avec les sondes suivantes :
Module tension,RMP temp 1 et 2, courrant, vario précision, gps
La lecture sur un terminal donne :

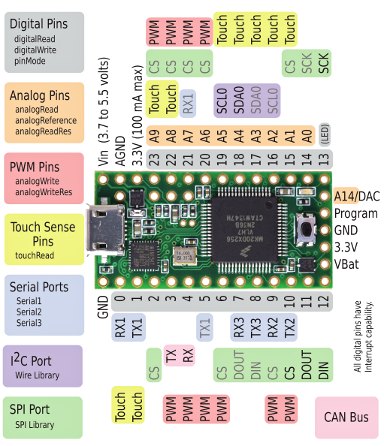
les connexions sont
RADIO ---> TEENSY
GND ---> GND
SPORT ---> 0 RX1

A suivre Bonne lecture
Dernière édition par djsyl le Mar 3 Fév 2015 - 19:22, édité 1 fois
Invité- Invité
Re: Décodage SPORT depuis la sortie Module Externe
par Sacre100 Mar 3 Fév 2015 - 14:58
N'oublie pas le bytestuffing lorsque tu rencontres le caractère 0x7D dans le flux de donnée.
Par ailleurs, est-ce que tu rencontres des séquences 0x7E Sensor-Id ou seulement des séquences 0x7E 0x10 Data_Id ... crc
Dernière question, combien de Teensy as-tu ?

Sacre100-
 Messages : 1889
Messages : 1889
Date d'inscription : 30/11/2013
Age : 67
Localisation : Blonay - Suisse
Re: Décodage SPORT depuis la sortie Module Externe
par Invité Mar 3 Fév 2015 - 15:15
en fait j'ai filtré un peut l'affichage mais il y a des 0x10 et des valeur derriere les 0x7E !
pour les teensy le stock baisse j'ai vu que lextronic en avait et nicephore doit en recommander on va se débrouiller a partir de 6 le port est gratuit normalement !
Invité- Invité
Re: Décodage SPORT depuis la sortie Module Externe
par Invité Mar 3 Fév 2015 - 16:49
3.1. Host end
11 bytes frame started and ended with 0x7E, with byte stuff.
Byte stuffing method:
Output
Byte in frame has value 0x7E is changed into 2 bytes: 0x7D 0x5E
Byte in frame has value 0x7D is changed into 2 bytes: 0x7D 0x5D
Input:
When byte 0x7D is received, discard this byte, and the next byte is XORed with 0x20;
Invité- Invité
Re: Décodage SPORT depuis la sortie Module Externe
par Sacre100 Mar 3 Fév 2015 - 17:16
- Code:
if (last_val == 0x7D) {
buf[cpt] = val ^ 0x20;
cpt += 1 ;
} else if (val != 0x7D) {
buf[cpt] = val;
cpt += 1 ;
}
last_val = val;
Sacre100- Messages : 1889
Date d'inscription : 30/11/2013
Age : 67
Localisation : Blonay - Suisse
Re: Décodage SPORT depuis la sortie Module Externe
par Invité Mar 3 Fév 2015 - 18:38

- Code:
// Receive buffer state machine state enum
enum FrSkyDataState {
STATE_DATA_IDLE,
STATE_DATA_IN_FRAME,
STATE_DATA_XOR,
};
void processSerialData(uint8_t data)
{
static uint8_t numPktBytes = 0;
static uint8_t dataState = STATE_DATA_IDLE;
if (data == START_STOP) {
dataState = STATE_DATA_IN_FRAME;
numPktBytes = 0;
}
else {
switch (dataState) {
case STATE_DATA_XOR:
frskyRxBuffer[numPktBytes++] = data ^ STUFF_MASK;
dataState = STATE_DATA_IN_FRAME;
break;
case STATE_DATA_IN_FRAME:
if (data == BYTESTUFF)
dataState = STATE_DATA_XOR; // XOR next byte
else
frskyRxBuffer[numPktBytes++] = data;
break;
}
}
if (numPktBytes == FRSKY_RX_PACKET_SIZE) {
processSportPacket(frskyRxBuffer);
dataState = STATE_DATA_IDLE;
}
}
Invité- Invité
Re: Décodage SPORT depuis la sortie Module Externe
par nicephore Mar 3 Fév 2015 - 18:48

et si nous avons HEAD = 0x7E PRIM = 0xFE ou 0xFD nous sommes en présence d'une frame qui doit également se terminer par 0x7E Afin de récupérer de façon certaine une frame pourquoi ne pas faire un double test par exemple:
7E FD 3 11 1 2 3 4E E F 7E
7E FD 5 12 4D A B C D 13 7E
byte Temp = Serial.read()
if ((Temp = 0xFE) and (Temp_old = 0x7E)) then
*/
traiter les données
*/
Temp_old = Temp
Mais PRIM est-il toujours = 0xFE a moins que ce ne soit 0xFD (la chose n'est pas simple) ?
D'après ce que j'ai pu lire oui mais ceci reste à vérifier.
Sylvain SVP tu nous postes des lignes brute de fonderie.
nicephore- Messages : 612
Date d'inscription : 14/06/2014
Localisation : Créteil
Re: Décodage SPORT depuis la sortie Module Externe
par Sacre100 Mar 3 Fév 2015 - 19:11
Sacre100- Messages : 1889
Date d'inscription : 30/11/2013
Age : 67
Localisation : Blonay - Suisse
Re: Décodage SPORT depuis la sortie Module Externe
par Invité Mar 3 Fév 2015 - 19:14
@Sacre100 Avec nicephore on va recommandé des teensy 3.1 dit nous si tu en a besoin
on fait un commande groupé ça evite les frais de port !
Correction du BYTESTUFF faite dans le code du 1er Post
Invité- Invité
Re: Décodage SPORT depuis la sortie Module Externe
par nicephore Mar 3 Fév 2015 - 20:47
Prévoir aussi des CAN
nicephore- Messages : 612
Date d'inscription : 14/06/2014
Localisation : Créteil
Re: Décodage SPORT depuis la sortie Module Externe
par Sacre100 Mar 3 Fév 2015 - 21:46
djsyl a écrit:...
@Sacre100 Avec nicephore on va recommandé des teensy 3.1 dit nous si tu en a besoin
...
C'est gentil de me le proposer mais je doute que ça vaille la peine avec les frais de ré-expédition pour la Suisse.
Et puis j'ai assez de chenit (désordre) chez moi avec plusieurs cartes qui traînent dans les tiroirs.
Vous les commandez où vos Teensy car 4a ne court pas les rues ?
Sacre100- Messages : 1889
Date d'inscription : 30/11/2013
Age : 67
Localisation : Blonay - Suisse
Re: Décodage SPORT depuis la sortie Module Externe
par nicephore Mar 3 Fév 2015 - 22:09
Ici: http://snootlab.com/pjrc-teensy/517-teensy-31-usb-fr.html
A partir de 6 les frais de port sont offert.
Après, moi je connais pas trop la suisse, tu m'invite
@SYLVAIN tu fait le voyage avec moi ?
nicephore- Messages : 612
Date d'inscription : 14/06/2014
Localisation : Créteil
Re: Décodage SPORT depuis la sortie Module Externe
par Sacre100 Mar 3 Fév 2015 - 22:50
Et puis avec l'Euro qui a baissé ces derniers temps de 20% face au Fr. Suisse, ça vaut vraiment la peine.
Sacre100- Messages : 1889
Date d'inscription : 30/11/2013
Age : 67
Localisation : Blonay - Suisse
Re: Décodage SPORT depuis la sortie Module Externe
par nicephore Mer 4 Fév 2015 - 11:43
Liste du matériel:
1 x Kit RF433
1 x Arduino Nano (pour la station de base)
1 x Teensy 3.1 (coté émission des données)
Nacelle Pan / Tilt
Librairie:
VirtualWire
=====================
Montage coté émission:

D'après la doc alimenter le module RF433 en 5 volts nous donnera une portée de 40m en indoor et 100 en extérieur pour une consommation de 25mA.
Montage coté réception:

=====================
Code partie émission:
- Code:
#include <VirtualWire.h>
void setup()
{
vw_setup(2000);
vw_set_tx_pin(3); }
void loop()
{
const char *msg = "$PAK;LONGITUDE;LATITUDE;ALTITUDE;CHKSUM"; // ou "$PAK;PAN;TILT;CHKSUM"
vw_send((uint8_t *)msg, strlen(msg));
vw_wait_tx();
delay(200);
}
Code partie réception:
- Code:
#include <VirtualWire.h>
void setup()
{
Serial.begin(9600);
vw_setup(2000);
vw_set_rx_pin(11);
vw_rx_start();
}
void loop()
{
uint8_t buf[VW_MAX_MESSAGE_LEN];
uint8_t buflen = VW_MAX_MESSAGE_LEN;
if (vw_get_message(buf, &buflen)){
int i;
for (i = 0; i < buflen; i++){
Serial.write(buf[i]);
}
Serial.println("");
}
}
Pour le moment ces codes ne s'occupent que d'envoyer / recevoir une phrase, le reste a faire est :
1°) Récupération des données GPS
2°)
Option 1: constituer la phase
Option 2: faire les calcules de PAN et TILT et les envoyer
3°) Récupération et parsing de la phrase
4°) Vérifier le check sum
5°)
Option 1: calculer les position PAN et TILT et positionner les servo
Option 2: positionner les servo.
=====================
Ces codes seront à adapter car en discutant avec Sylvain, le mieux serait de faire les calcules de PAN et TILT coté émission (là y-a une teensy qui pédale plus fort qu'une Arduino).
Coté réception L'Arduino n'aura qu'a utiliser la librairie servo afin de les positionnés.
Dans une premier temps il est possible d'imaginer le processus ainsi:
1°) Placer la station de base.
1.1°) Initialiser les servos à une position zéro pour le PAN et TILT (au GPS Fixe)
2°) Placer le modèle a coté de la station de base.
2.1°) Alimenter le modèle
3°) Attendre le GPS Fixe
4°) Placer le modèle sur son lieu de décollage (mais en restant en face de l'angle zéro du PAN)
* suggestion de Sylvain: disposer d'un magnéto ou d'un GPS dans la station d’accueil afin d'éviter de devoir a attendre le GPS Fixe avant de placer le modèle sur l'aire d'envol.
Bon maintenant je dois retourner en classe afin de revoir les fonctions de trigonométrique car franchement je devais être malade ce jour là
Après coté station de base il reste aussi possible d'avoir un PC et décoder les informations reçus afin de les afficher sur l'écran (position Google MAP, tension lipo, GPS Fixe, des alertes là aussi ...) (cf. sous Delphi voir l'objet comPort).
Si vous avez des suggestions ...
nicephore- Messages : 612
Date d'inscription : 14/06/2014
Localisation : Créteil
Re: Décodage SPORT depuis la sortie Module Externe
par Sacre100 Mer 4 Fév 2015 - 11:58
Sacre100- Messages : 1889
Date d'inscription : 30/11/2013
Age : 67
Localisation : Blonay - Suisse
Re: Décodage SPORT depuis la sortie Module Externe
par nicephore Mer 4 Fév 2015 - 12:01
Sacre100 a écrit:Juste une question (un peu pavé dans la mare) : Pourquoi ne faites vous pas ça tout bêtement en LUA ?
Sacre,
mais non c'est pas un pavé dans la marre
oui j'avais y-a un certain temps posé la question. Mais donc comment le faire sans fil à la patte, de plus même si nous acceptons un fil à la patte (fil entre la Taranis et la station de base) est-il possible en LUA d'utiliser la sortie écolage et donc ainsi positionner les servo ?
Ou encore en LUA envoyer des données à la station de base, mais dans ce cas comment: un module externe et son récepteur en face ? (pourquoi pas)
nicephore- Messages : 612
Date d'inscription : 14/06/2014
Localisation : Créteil
Re: Décodage SPORT depuis la sortie Module Externe
par Sacre100 Mer 4 Fév 2015 - 12:13
nicephore a écrit:Sacre100 a écrit:Juste une question (un peu pavé dans la mare) : Pourquoi ne faites vous pas ça tout bêtement en LUA ?
Sacre,
mais non c'est pas un pavé dans la marre
oui j'avais y-a un certain temps posé la question. Mais donc comment le faire sans fil à la patte, de plus même si nous acceptons un fil à la patte (fil entre la Taranis et la station de base) est-il possible en LUA d'utiliser la sortie écolage et donc ainsi positionner les servo ?
Ou encore en LUA envoyer des données à la station de base, mais dans ce cas comment: un module externe et son récepteur en face ? (pourquoi pas)
En première idée, oui, un module externe et un récepteur.
D'un autre côté, un système indépendant tel que vous le faites, n'exige pas de programmation particulière de chaque modèle et peut être facilement prêté à un copain.
Sacre100- Messages : 1889
Date d'inscription : 30/11/2013
Age : 67
Localisation : Blonay - Suisse
Re: Décodage SPORT depuis la sortie Module Externe
par Sacre100 Mer 4 Fév 2015 - 12:27
nicephore a écrit:...
est-il possible en LUA d'utiliser la sortie écolage et donc ainsi positionner les servo ?
...
Pour répondre à cette question, LUA ne permet pas d'écrire directement sur la prise écolage mais avec les "model script" tupeut calculer des valeurs qui peuvent être utilisées comme sources dans un mixage.
Autrement dit, le script calcule deux output (pan & tilt) qui sont repris comme source dans le mixage sur deux voies de ton choix.
Du reste, pour la mise au point des algorithmes, ça peut être pratique de les programmer et tester en LUA puis de les retranscrire en C pour l'Arduino.
Sacre100- Messages : 1889
Date d'inscription : 30/11/2013
Age : 67
Localisation : Blonay - Suisse
Re: Décodage SPORT depuis la sortie Module Externe
par nicephore Mer 4 Fév 2015 - 12:28

nicephore- Messages : 612
Date d'inscription : 14/06/2014
Localisation : Créteil
Re: Décodage SPORT depuis la sortie Module Externe
par Sacre100 Mer 4 Fév 2015 - 12:41
nicephore a écrit:attends je suis à l'écoleje fait de la trigo
Jette un coup d'oeil sur mon délire d'horizon artificiel, tu as déjà quelques calculs qui peuvent t'intéresser (heading et distance) dans la fonction gpsCalculation() : https://frskytaranis.forumactif.org/t1291-arduimu-v3-gps-s-port
Autre réflexion, si vous faites un systèmes indépendant, c'est d'avoir un GPS sur la station de base. Il existe des GPS qui ont aussi un magnétomètre (une boussole), c'est l'idéal car vous obtiendrez non seulement la position de la station de base mais aussi son orientation et ça vous simplifiera grandement la vie.
Exemple de GPS avec magnétomètre : http://hobbyking.com/hobbyking/store/__64142__HKPilot_Micro_GPS_and_Compass_Module_U_BLOX_7_8g_.html
Sacre100- Messages : 1889
Date d'inscription : 30/11/2013
Age : 67
Localisation : Blonay - Suisse
Re: Décodage SPORT depuis la sortie Module Externe
par nicephore Mer 4 Fév 2015 - 12:47
- Code:
long getPAN_TILT(
float homeLAT, // latitude station de base
float homeLNG, // longitude station de base
float quadLAT, // latitude du modele
float quadLNG, // longitude du model
float ALT, // altitude du model - altitude de la station de base
) {
earth_radius = 6371000; // rayon de la terre 6371kms
homeLNG = homeLNG / 180 * PI;
homeLAT = homeLAT / 180 * PI;
quadLNG = quadLNG / 180 * PI;
quadLAT = quadLAT / 180 * PI;
// Calcul du PAN
tmpPAN = atan2(sin(quadLNG - homeLNG)* cos(quadLAT), cos(homeLAT) * sin(quadLAT) - sin(homeLAT) * cos(quadLAT) * cos(quadLNG - homeLNG));
PAN = tmpPAN * 180 / PI;
if (PAN < 0)
PAN = 360 + PAN;
// Calcul de la distance
dLAT = (quadLAT - homeLAT);
dLNG = (quadLNG - homeLNG);
a = sin(dLAT / 2) * sin(dLAT / 2) + sin(dLNG / 2) * sin(dLNG / 2) * cos(homeLAT) * cos(quadLAT);
c = 2 * asin(sqrt(tmpPAN));
d = earth_radius * c;
// Calcul du TILT
TILT = atan(ALT / d);
TILT = TILT * 360 / (2 * PI);
return PAN, TILT
}// end getPAN_TILT
Ca me semble bon ... mais c'est tellement vieux tous ça, si une âme charitable pouvait vérifier.
Par avance merci.
nicephore- Messages : 612
Date d'inscription : 14/06/2014
Localisation : Créteil
Re: Décodage SPORT depuis la sortie Module Externe
par nicephore Mer 4 Fév 2015 - 12:57
merci je vais regarder.Sacre100 a écrit:
Jette un coup d'oeil sur mon délire d'horizon artificiel, tu as déjà quelques calculs qui peuvent t'intéresser (heading et distance) dans la fonction gpsCalculation() : https://frskytaranis.forumactif.org/t1291-arduimu-v3-gps-s-port
Sacre100 a écrit:
Autre réflexion, si vous faites un systèmes indépendant, c'est d'avoir un GPS sur la station de base. Il existe des GPS qui ont aussi un magnétomètre (une boussole), c'est l'idéal car vous obtiendrez non seulement la position de la station de base mais aussi son orientation et ça vous simplifiera grandement la vie.
Exemple de GPS avec magnétomètre : http://hobbyking.com/hobbyking/store/__64142__HKPilot_Micro_GPS_and_Compass_Module_U_BLOX_7_8g_.html
Ok mais en fait si nous avons déjà les coordonnées GPS (dépose du modèle auprès de la station de base et attendre le fixe GPS) ça reviens au même car en fait la station de base ne bouge pas (a moins quelle ne soit portable et/ou attachée à la Taranis) ...
Réflexion:
donner le choix à l'utilisateur via un DEFINE dans le code arduino de la station de base.
Mais idée effectivement a conserver car ce n'est jamais plus que 19 euros de +.
nicephore- Messages : 612
Date d'inscription : 14/06/2014
Localisation : Créteil
Re: Décodage SPORT depuis la sortie Module Externe
par Sacre100 Mer 4 Fév 2015 - 13:26
nicephore a écrit:...Sacre100 a écrit:
Autre réflexion, si vous faites un systèmes indépendant, c'est d'avoir un GPS sur la station de base. Il existe des GPS qui ont aussi un magnétomètre (une boussole), c'est l'idéal car vous obtiendrez non seulement la position de la station de base mais aussi son orientation et ça vous simplifiera grandement la vie.
Exemple de GPS avec magnétomètre : http://hobbyking.com/hobbyking/store/__64142__HKPilot_Micro_GPS_and_Compass_Module_U_BLOX_7_8g_.html
Ok mais en fait si nous avons déjà les coordonnées GPS (dépose du modèle auprès de la station de base et attendre le fixe GPS) ça reviens au même car en fait la station de base ne bouge pas (a moins quelle ne soit portable et/ou attachée à la Taranis) ...
Réflexion:
donner le choix à l'utilisateur via un DEFINE dans le code arduino de la station de base.
Mais idée effectivement a conserver car ce n'est jamais plus que 19 euros de +.
Oui pour la position mais non pour l'orientation.
La plupart des headtracker, tu dois les initialiser en posant ton engin à une certaine distance (30m) de ton antenne puis orienter ton antenne en direction de l'appareil. Lors de cette procédure d'initialisation, l'antenne repère bien sa position en utilisant celle de l'appareil mais elle ne repère pas automatiquement son orientation, c'est pourquoi tu dois le faire manuellement.
Avec un tel GPS, tu ne te poses plus de question. Tu poses ton antenne, t'allumes et quand les GPS ont fait leur fix et que le système s'est initialisé tout seul, tu lances, elle n'est pas belle la vie
Sacre100- Messages : 1889
Date d'inscription : 30/11/2013
Age : 67
Localisation : Blonay - Suisse
Re: Décodage SPORT depuis la sortie Module Externe
par nicephore Mer 4 Fév 2015 - 13:31
Oui ce qui dans ma procédure:
Dans une premier temps il est possible d'imaginer le processus ainsi:
1°) Placer la station de base.
1.1°) Initialiser les servos à une position zéro pour le PAN et TILT (au GPS Fixe)
2°) Placer le modèle a coté de la station de base.
2.1°) Alimenter le modèle
3°) Attendre le GPS Fixe
4°) Placer le modèle sur son lieu de décollage (mais en restant en face de l'angle zéro du PAN)
Ce qui retire les points 1.1, 2 et 4 ...
Je conserve en mémoire.
nicephore- Messages : 612
Date d'inscription : 14/06/2014
Localisation : Créteil
Re: Décodage SPORT depuis la sortie Module Externe
par Sacre100 Mer 4 Fév 2015 - 14:20

Sacre100- Messages : 1889
Date d'inscription : 30/11/2013
Age : 67
Localisation : Blonay - Suisse
Page 1 sur 2 • 1, 2
» Utilisation en même temps module interne et un module externe pour 2 recepteurs différents
» Flasher Module externe VS flasher S-port externe X10S OpenTx 2.3
» Module externe
» Module DM9 hs depuis mise à jour