







Naza-Canbus -> Frsky s-port
Page 1 sur 2 • 1, 2 
Naza-Canbus -> Frsky s-port
par Invité Ven 23 Jan 2015 - 13:07
Le principe est presque le même sauf que la on va décoder le CAN-BUS du Naza
L'avantage est de récupérer beaucoup plus d'information ...
pour n'en citer que quelque un :
Pitch, Roll, Mode de vol, tension Lipo, latitude, longitude, Gps altitude, altitude baro, cog, vitess, vsi,fix gps, nb sat, cap ...
Le schéma est assez simple
CAN-BUS NAZA -> conversion des signaux can -> serie -> Microcontroleur Teensy 3.1 -> S-port Frsky
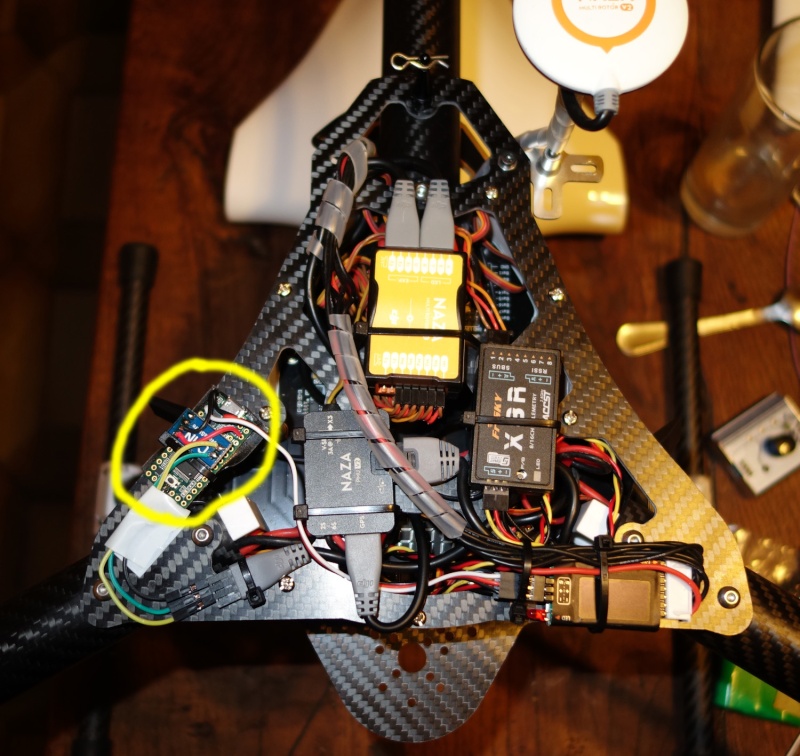
Voilà a quoi ça ressemble une fois fini :
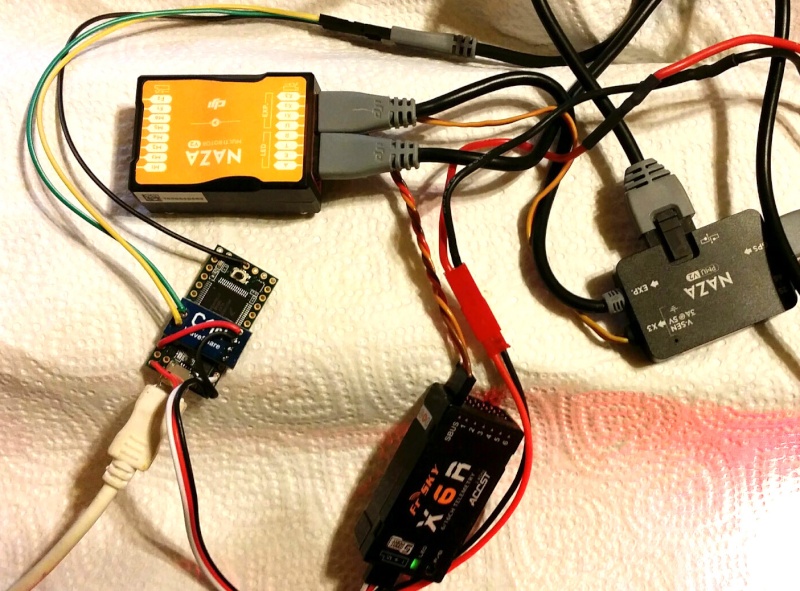
Coté matériel il faut :
1 Teensy 3.1 moins de 20 Euros

1 Convertiseur CAN / serie moins de 1 Euro

Il faudra le raccourcir un peut pour obtenir quelque chose d'encore plus compact


quelques morceaux de fil et connecteur que vous avez tous dans vos tiroir

Coté code j'ai réunis et modifier des morceaux existant sur le Rcgroup
une partie du nazadécodeur de Pawelsky http://www.rcgroups.com/forums/showthread.php?t=1995704
et une partie du code mavlink -> frsky faite par Rolf Blomgren http://diydrones.com/forum/topics/amp-to-frsky-x8r-sport-converter?id=705844:Topic:1539556&page=1#comments
La partie de code que j'ai écrit et modifié est ici :
http://f8byc1.free.fr/taranis/naza-frsky/Naza-FrSky.zip
Naza-FrSky.ino et FrSkySPort.ino
- Code:
/*
DJI Naza (v1/V2 + PMU) CAN data decoder library example
Outputs data to a serial port
(c) Pawelsky 20140921
Not for commercial use
Requires FlexCan library v0.1-beta (or newer if compatible)
https://github.com/teachop/FlexCAN_Library/releases/tag/v0.1-beta
Requires NazaCanDecoder library by Pawelsky
http://www.rcgroups.com/forums/showpost.php?p=27129264&postcount=1
Requires Teensy 3.1 board and CAN transceiver
Complie with "CPU speed" set to "96MHz (overclock)"
Refer to naza_can_decoder_wiring.jpg diagram for proper connection
Connections can be greatly simplified using CAN bus and MicroSD shields by Pawelsky
(see teensy_shields.jpg for installation and naza_can_decoder_wiring_shields.jpg for wiring)
*/
#include "NazaCanDecoderLib.h"
#include "FlexCAN.h"
#include "FrSkySPort.h"
// Use Serial to output data via USB or Serial1 to use Teensy's first serial port
#define SERIAL_PORT Serial
uint32_t currTime, attiTime, otherTime, clockTime;
char dateTime[20];
uint32_t messageId;
int led = 13;
void setup()
{
pinMode(led, OUTPUT);
SERIAL_PORT.begin(115200);
FrSkySPort_Init();
NazaCanDecoder.begin();
}
void loop()
{
messageId = NazaCanDecoder.decode();
// if(messageId) { SERIAL_PORT.print("Message "); SERIAL_PORT.print(messageId, HEX); SERIAL_PORT.println(" decoded"); }
currTime = millis();
// Display attitude at 10Hz rate so every 100 milliseconds
if(attiTime < currTime)
{
attiTime = currTime + 100;
SERIAL_PORT.print("Pitch: "); SERIAL_PORT.print(NazaCanDecoder.getPitch());
SERIAL_PORT.print(", Roll: "); SERIAL_PORT.println(NazaCanDecoder.getRoll());
}
// Display other data at 5Hz rate so every 200 milliseconds
if(otherTime < currTime)
{
otherTime = currTime + 200;
SERIAL_PORT.print("Mode: ");
switch (NazaCanDecoder.getMode())
{
case NazaCanDecoderLib::MANUAL: SERIAL_PORT.print("MAN"); break;
case NazaCanDecoderLib::GPS: SERIAL_PORT.print("GPS"); break;
case NazaCanDecoderLib::FAILSAFE: SERIAL_PORT.print("FS"); break;
case NazaCanDecoderLib::ATTI: SERIAL_PORT.print("ATT"); break;
default: SERIAL_PORT.print("UNK");
}
SERIAL_PORT.print(", Bat: "); SERIAL_PORT.println(NazaCanDecoder.getBattery() / 1000.0, 2);
SERIAL_PORT.print("Lat: "); SERIAL_PORT.print(NazaCanDecoder.getLat(), 7);
SERIAL_PORT.print(", Lon: "); SERIAL_PORT.print(NazaCanDecoder.getLon(), 7);
SERIAL_PORT.print(", GPS alt: "); SERIAL_PORT.print(NazaCanDecoder.getGpsAlt());
SERIAL_PORT.print(", COG: "); SERIAL_PORT.print(NazaCanDecoder.getCog());
SERIAL_PORT.print(", Speed: "); SERIAL_PORT.print(NazaCanDecoder.getSpeed());
SERIAL_PORT.print(", VSI: "); SERIAL_PORT.print(NazaCanDecoder.getVsi());
SERIAL_PORT.print(", Fix: ");
switch (NazaCanDecoder.getFixType())
{
case NazaCanDecoderLib::NO_FIX: SERIAL_PORT.print("No fix"); break;
case NazaCanDecoderLib::FIX_2D: SERIAL_PORT.print("2D"); break;
case NazaCanDecoderLib::FIX_3D: SERIAL_PORT.print("3D"); break;
case NazaCanDecoderLib::FIX_DGPS: SERIAL_PORT.print("DGPS"); break;
default: SERIAL_PORT.print("UNK");
}
SERIAL_PORT.print(", Sat: "); SERIAL_PORT.println(NazaCanDecoder.getNumSat());
SERIAL_PORT.print("Alt: "); SERIAL_PORT.print(NazaCanDecoder.getAlt());
SERIAL_PORT.print(", Heading: "); SERIAL_PORT.println(NazaCanDecoder.getHeading());
}
// Display date/time at 1Hz rate so every 1000 milliseconds
if(clockTime < currTime)
{
clockTime = currTime + 1000;
sprintf(dateTime, "%4u.%02u.%02u %02u:%02u:%02u",
NazaCanDecoder.getYear() + 2000, NazaCanDecoder.getMonth(), NazaCanDecoder.getDay(),
NazaCanDecoder.getHour(), NazaCanDecoder.getMinute(), NazaCanDecoder.getSecond());
SERIAL_PORT.print("Date/Time: "); SERIAL_PORT.println(dateTime);
}
NazaCanDecoder.heartbeat();
FrSkySPort_Process();
}
- Code:
#include "FrSkySPort.h"
#define _FrSkySPort_Serial Serial1
#define _FrSkySPort_C1 UART0_C1
#define _FrSkySPort_C3 UART0_C3
#define _FrSkySPort_S2 UART0_S2
#define _FrSkySPort_BAUD 57600
#define MAX_ID_COUNT 19
short crc; // used for crc calc of frsky-packet
uint8_t lastRx;
uint32_t FR_ID_count = 0;
uint8_t cell_count = 0;
uint8_t latlong_flag = 0;
uint32_t latlong = 0;
uint8_t first=0;
// POUR TEST
int32_t ap_latitude = 0; // 585522540;
int32_t ap_longitude = 0; // 162344467;
int32_t ap_gps_altitude = 0; // 1000 = 1m
// ***********************************************************************
void FrSkySPort_Init(void) {
_FrSkySPort_Serial.begin(_FrSkySPort_BAUD);
_FrSkySPort_C3 = 0x10; // Tx invert
_FrSkySPort_C1= 0xA0; // Single wire mode
_FrSkySPort_S2 = 0x10; // Rx Invert
}
// ***********************************************************************
void FrSkySPort_Process(void) {
uint8_t data = 0;
uint32_t temp=0;
uint8_t offset;
while ( _FrSkySPort_Serial.available())
{
data = _FrSkySPort_Serial.read();
if (lastRx == START_STOP && ((data == SENSOR_ID1) || (data == SENSOR_ID2) || (data == SENSOR_ID3) || (data == SENSOR_ID4)))
{
switch(FR_ID_count) {
case 0:
FrSkySPort_SendPackage(FR_ID_ALTITUDE,NazaCanDecoder.getAlt() * 100 ); //
break;
case 1:
switch (NazaCanDecoder.getFixType())
{
case NazaCanDecoderLib::NO_FIX: FrSkySPort_SendPackage(FR_ID_T2,0 ); break;
case NazaCanDecoderLib::FIX_2D: FrSkySPort_SendPackage(FR_ID_T2,2 ); break;
case NazaCanDecoderLib::FIX_3D: FrSkySPort_SendPackage(FR_ID_T2,3 ); break;
case NazaCanDecoderLib::FIX_DGPS: FrSkySPort_SendPackage(FR_ID_T2,4 ); break;
default: FrSkySPort_SendPackage(FR_ID_T2,99 );
}
break;
case 2:
FrSkySPort_SendPackage(FR_ID_GPS_ALT,NazaCanDecoder.getGpsAlt()*100);
break;
case 3:
FrSkySPort_SendPackage(FR_ID_VFAS,NazaCanDecoder.getBattery() /10);
break;
case 4: // Sends the ap_longitude value, setting bit 31 high
ap_longitude = abs(NazaCanDecoder.getLon()*10000000);
if(ap_longitude < 0)
latlong=((abs(ap_longitude)/100)*6) | 0xC0000000;
else
latlong=((abs(ap_longitude)/100)*6) | 0x80000000;
FrSkySPort_SendPackage(FR_ID_LATLONG,latlong);
break;
case 5: // Sends the ap_latitude value, setting bit 31 low
ap_latitude = abs(NazaCanDecoder.getLat()*10000000);
if(ap_latitude < 0 )
latlong=((abs(ap_latitude)/100)*6) | 0x40000000;
else
latlong=((abs(ap_latitude)/100)*6);
FrSkySPort_SendPackage(FR_ID_LATLONG,latlong);
break;
case 6:
FrSkySPort_SendPackage(FR_ID_HEADING,NazaCanDecoder.getHeading()*100 );
break;
case 7:
switch (NazaCanDecoder.getMode())
{
case NazaCanDecoderLib::MANUAL: FrSkySPort_SendPackage(FR_ID_T1,0 ); break;
case NazaCanDecoderLib::ATTI: FrSkySPort_SendPackage(FR_ID_T1,1 ); break;
case NazaCanDecoderLib::GPS: FrSkySPort_SendPackage(FR_ID_T1,2 ); break;
case NazaCanDecoderLib::FAILSAFE: FrSkySPort_SendPackage(FR_ID_T1,3 ); break;
default: FrSkySPort_SendPackage(FR_ID_T2,99 );
}
break;
case 8:
FrSkySPort_SendPackage(FR_ID_FUEL,NazaCanDecoder.getNumSat() ); break;
}
FR_ID_count++;
if(FR_ID_count > MAX_ID_COUNT) FR_ID_count = 0;
}
lastRx=data;
}
}
// ***********************************************************************
void FrSkySPort_SendByte(uint8_t byte) {
_FrSkySPort_Serial.write(byte);
// CRC update
crc += byte; //0-1FF
crc += crc >> 8; //0-100
crc &= 0x00ff;
crc += crc >> 8; //0-0FF
crc &= 0x00ff;
}
// ***********************************************************************
void FrSkySPort_SendCrc() {
_FrSkySPort_Serial.write(0xFF-crc);
crc = 0; // CRC reset
}
// ***********************************************************************
void FrSkySPort_SendPackage(uint16_t id, uint32_t value) {
// if(MavLink_Connected) {
if (1==1) {
}
digitalWrite(led,HIGH);
_FrSkySPort_C3 |= 32; // Transmit direction, to S.Port
FrSkySPort_SendByte(DATA_FRAME);
uint8_t *bytes = (uint8_t*)&id;
FrSkySPort_SendByte(bytes[0]);
FrSkySPort_SendByte(bytes[1]);
bytes = (uint8_t*)&value;
FrSkySPort_SendByte(bytes[0]);
FrSkySPort_SendByte(bytes[1]);
FrSkySPort_SendByte(bytes[2]);
FrSkySPort_SendByte(bytes[3]);
FrSkySPort_SendCrc();
_FrSkySPort_Serial.flush();
_FrSkySPort_C3 ^= 32; // Transmit direction, from S.Port
digitalWrite(led,LOW);
}
FrskySPort.h
- Code:
// Frsky Sensor-ID to use.
#define SENSOR_ID1 0x1B // ID of sensor. Must be something that is polled by FrSky RX
#define SENSOR_ID2 0x0D
#define SENSOR_ID3 0x34
#define SENSOR_ID4 0x67
// Frsky-specific
#define START_STOP 0x7e
#define DATA_FRAME 0x10
//Frsky DATA ID's
#define FR_ID_SPEED 0x0830
#define FR_ID_VFAS 0x0210
#define FR_ID_CURRENT 0x0200
#define FR_ID_RPM 0x050F
#define FR_ID_ALTITUDE 0x0100
#define FR_ID_FUEL 0x0600
#define FR_ID_ADC1 0xF102
#define FR_ID_ADC2 0xF103
#define FR_ID_LATLONG 0x0800
#define FR_ID_CAP_USED 0x0600
#define FR_ID_VARIO 0x0110
#define FR_ID_CELLS 0x0300
#define FR_ID_CELLS_LAST 0x030F
#define FR_ID_HEADING 0x0840
#define FR_ID_ACCX 0x0700
#define FR_ID_ACCY 0x0710
#define FR_ID_ACCZ 0x0720
#define FR_ID_T1 0x0400
#define FR_ID_T2 0x0410
#define FR_ID_GPS_ALT 0x0820
Il vous faut utiliser les libraries de ces 2 liens :
la partie Frsky est ici : MavLink_FrSkySPort_1.3.zip
la partie décodeur can est la NazaDecoder20141130 NazaDecoder library for Arduino v20141130 (86.8 KB) 276 views zip
ATTENTION cela fonctionne en l'état mais tout n'est pas fini de tester
A cela il faudra rajouter de beau scripts LUA (en cours de modification car c'est pas le même combat que la Dropix
)Bonne lecture
Sylvain
Dernière édition par djsyl le Ven 23 Jan 2015 - 14:22, édité 1 fois
Invité- Invité
Re: Naza-Canbus -> Frsky s-port
par Stinger Ven 23 Jan 2015 - 13:48
ça me tente bien d'essayer ça.
Pour le teensy 3.1 il faut plutôt compter 30€ avec les frais de port.
j'attends de voir la suite !
Dernière édition par Stinger le Ven 23 Jan 2015 - 13:57, édité 1 fois

Stinger- Messages : 437
Date d'inscription : 31/07/2014
Age : 45
Localisation : (44) Fay de Bretagne
Re: Naza-Canbus -> Frsky s-port
par cdauv Ven 23 Jan 2015 - 13:55
Très intéressant
J'attends la suite pour appliquer sur mon QAV400

cdauv-
 Messages : 176
Messages : 176
Date d'inscription : 24/07/2013
Age : 58
Localisation : Le Plessis Bouchard (95) -

Re: Naza-Canbus -> Frsky s-port
par Invité Ven 23 Jan 2015 - 14:26
chez moi sur la table c'est déjà fonctionnel
il faut que je refasse bien le tour de toutes les données possible (j'ai pas encore tout exploité dans le prog mais les données les plus importantes sont la ! )
Dans la 1ere partie du code il y en a les 3/4 qui ne servent a rien ça revoie juste les données récupérés sur le Naza et ça les renvoie sur le port série (USB)
il suffit d'ouvrir un terminal pour voir ce que l'on reçoit !
Pour les prix j'ai commander chez SNOOTLAB http://snootlab.com/pjrc-teensy/517-teensy-31-usb-fr.html
J'ai demandé a Banggood qu'il en stock on verra bien ...
Invité- Invité
Re: Naza-Canbus -> Frsky s-port
par nicephore Ven 23 Jan 2015 - 14:46
Quel est la taille du scketch ?
Ça passe avec une Arduino NANO ? Car les NANO sont moins couteuse qu'une TEENYS (cf. voir banggood).
Si tu peux faire un test ... et me dire ...
A+Bruno
nicephore- Messages : 612
Date d'inscription : 14/06/2014
Localisation : Créteil
Re: Naza-Canbus -> Frsky s-port
par Invité Ven 23 Jan 2015 - 14:54
Pour ce qui est des QAV400 il suffit qu'il ait un NAZA avec un Can bus donc V2 ou
V1 + PMU ou Lite craqué V2 + PMU
Pour ce qui est de la suite le script a modifier est la :
https://frskytaranis.forumactif.org/t1746-annonces-vocal-pour-dropix-pixhawk-amp#17899
il faut simplement adapter un peut
et pour les données qui ne sont pas encore la
il faut poursuivre avec de qu'il manque après :
case 8:
FrSkySPort_SendPackage(FR_ID_FUEL,NazaCanDecoder.getNumSat() ); break;
et ajouter ce qu'il manque
courage courage il faut participer ...
le plus dur est déjà fait !
Invité- Invité
Re: Naza-Canbus -> Frsky s-port
par Sacre100 Ven 23 Jan 2015 - 15:18
djsyl a écrit:Arffff c'est un problème de hard après pour faire du Sport sur arduino tu ne peut pas sans inversé les signaux ... que la pas de composants en plus !
...
Euh, c'est pas si compliqué, je les fais pour l'ArduIMU, jette un coup d'oeil là-dessus : https://frskytaranis.forumactif.org/t1291-arduimu-v3-gps-s-port

Sacre100- Messages : 1889
Date d'inscription : 30/11/2013
Age : 67
Localisation : Blonay - Suisse
Re: Naza-Canbus -> Frsky s-port
par Invité Ven 23 Jan 2015 - 15:32
Je dit pas que c'est infaisable sur un arduino mini mais que ça ajoute du hard pour l'inversion sport
en plus pour le can il faut aller quand même assez vite ...
au faite il y a des 10 dof a 10€ chez banggood avec un arduino mini a 3 € ça fait une carte de vol full multiwii a pas cher

Invité- Invité
Re: Naza-Canbus -> Frsky s-port
par Sacre100 Ven 23 Jan 2015 - 15:47
djsyl a écrit:Ca vaut juste 80$ un ardu imu V3
Je dit pas que c'est infaisable un un arduino mini mais que ça ajoute du hard pour l'inversion sport
en plus pour le can il faut aller quand même assez vite ...
Pas besoin d'ajouter du hard, on y arrive très bien avec le soft adhoc.
Je suis en train de porter mon truc sur un Arduino Pro Mini (4$), un GY-87 10DOF (13$) et un GPS Ublox (27$).
La partie GY-87 et S.Port fonctionnent sans soucis et sans hard additionnel.
Par contre, je butte sur la partie GPS Ublox, j'aurais dû rester sur du NMEA tout simple.
Sacre100- Messages : 1889
Date d'inscription : 30/11/2013
Age : 67
Localisation : Blonay - Suisse
Re: Naza-Canbus -> Frsky s-port
par Sacre100 Ven 23 Jan 2015 - 16:51
FrSkySPort.ino
- Code:
// ***********************************************************************
void FrSkySPort_SendByte(uint8_t byte) {
// _FrSkySPort_Serial.write(byte);
if (( byte == START_STOP ) || ( byte == BYTESTUFF )) {
_FrSkySPort_Serial.write(BYTESTUFF) ;
_FrSkySPort_Serial.write(byte ^ STUFF_MASK) ;
} else {
_FrSkySPort_Serial.write(byte) ;
}
// CRC update
crc += byte; //0-1FE -> commentaire adéquat
crc += crc >> 8; //0-1FF -> commentaire adéquat
crc &= 0x00ff; // 0-0FF -> commentaire adéquat
// crc += crc >> 8; //0-0FF -> ligne inutile
// crc &= 0x00ff; // -> ligne inutile
}
// ***********************************************************************
void FrSkySPort_SendCrc() {
// _FrSkySPort_Serial.write(0xFF-crc);
crc = 0xFF-crc
if (( crc == START_STOP ) || ( crc == BYTESTUFF )) {
_FrSkySPort_Serial.write(BYTESTUFF) ;
_FrSkySPort_Serial.write(crc ^ STUFF_MASK) ;
}else {
_FrSkySPort_Serial.write(crc ) ;
}
crc = 0; // CRC reset
}
Et dans FrSkySPort.h, il faut ajouter quelque part :
- Code:
#define BYTESTUFF 0x7d
#define STUFF_MASK 0x20
Sacre100- Messages : 1889
Date d'inscription : 30/11/2013
Age : 67
Localisation : Blonay - Suisse
Re: Naza-Canbus -> Frsky s-port
par Invité Ven 23 Jan 2015 - 18:13
Je vais regarder ça de prés mais c'est une partie que je n'ai pas modifié !
ça n'a pas l'air de pénaliser le fonctionnement ( je reçoit bien les infos sur le sport du récepteur)
Mauvais calcul des checksum des trames a ton avis ?
si ça fonctionne il doit pas y avoir beaucoup de contrôle au bout
Invité- Invité
Re: Naza-Canbus -> Frsky s-port
par Invité Ven 23 Jan 2015 - 18:35
void FrSkySPort_SendCrc() {
// _FrSkySPort_Serial.write(0xFF-crc);
crc = 0xFF-crc manque le ";"
je viens de corrigé et recompiler avec tes modifs ... ça fait pas de mal et tout marche encore
Invité- Invité
Re: Naza-Canbus -> Frsky s-port
par Sacre100 Ven 23 Jan 2015 - 19:29
Le calcul du crc donne exctement le même résultat. Les deux dernières lignes ne font rien en fait. Ce code inutile vient de frsky qui a dû le copier de je ne sais où. J'ai vu ça sur github et en lisant attentivement le code, effectivemet, ces deux dernière ligne ne font rien de plus.
Le truc avec le BYTESTUFF, c'est pour éviter d'avoir le START_STOP (0x7e) qui circule dans les trames. Dans ce cas, le byte est remplacé par deux bytes qui se suivent 0x7D 0x5E. Naturellement, si le BYTESTUFF (0x7D) est dans la trame, il faut aussi le remplacer par deux bytes qui se suivent, 0x7D 0x5D.
A noter que si cela n'a pas été corrigé, openXsensor ne fait pas le bytestuffing du crc ce qui est une erreur.
Si le bytestuffing n'est pas fait, des trames peuvent être perdues sans que l'on s'en apperçoive si la donnée est transférée fréquemment.
Sacre100- Messages : 1889
Date d'inscription : 30/11/2013
Age : 67
Localisation : Blonay - Suisse

Invité- Invité
Re: Naza-Canbus -> Frsky s-port
par Stinger Lun 2 Fév 2015 - 23:52
Niveau conso batterie, peut on avoir le pourcentage restant ou quelque chose du genre mais autre que le voltage ?
cela pourrait intéresser un ami qui débute avec un quad, et il avait trouvé sympa que sur le phantom il y ai l'autonomie restante en pourcentage.
Stinger- Messages : 437
Date d'inscription : 31/07/2014
Age : 45
Localisation : (44) Fay de Bretagne
Re: Naza-Canbus -> Frsky s-port
par Invité Mar 3 Fév 2015 - 5:56
Rien n'interdit d'ajouter un capteur de courant ...
De mon coté j'ajoute toujours le module tension qui donne l'info par éléments je trouve ça beaucoup plus sécure pour les lipo !
Invité- Invité
Re: Naza-Canbus -> Frsky s-port
par Stinger Mar 3 Fév 2015 - 13:22
Stinger- Messages : 437
Date d'inscription : 31/07/2014
Age : 45
Localisation : (44) Fay de Bretagne
Re: Naza-Canbus -> Frsky s-port
par Invité Mar 3 Fév 2015 - 14:22
convertir des valeur de 4.2 volts a 3.5 volts en nombre de 100 a 0 %
puis annoncer les valeurs a chaque chngement de 1%
Invité- Invité
Re: Naza-Canbus -> Frsky s-port
par Invité Mer 4 Fév 2015 - 9:07
Super boulot...ça donne envie de faire chauffer le fer a souder...
Invité- Invité
Re: Naza-Canbus -> Frsky s-port
par Invité Ven 13 Mar 2015 - 22:17
Super boulot super intéressant je vais essayer de m'en faire un par contre je n'y connait rien en électronique ou peut on trouver le convertisseur can/ série merci d avance pour votre aide.
A bientot
Invité- Invité
Re: Naza-Canbus -> Frsky s-port
par Invité Sam 14 Mar 2015 - 7:32
http://www.aliexpress.com/premium/can-transceiver-board.html?ltype=wholesale&SearchText=can+transceiver+board&isPremium=y&d=y&origin=y&initiative_id=SB_20150313223005&isViewCP=y&catId=0
Invité- Invité
Invité- Invité
Re: Naza-Canbus -> Frsky s-port
par nicephore Lun 30 Mar 2015 - 9:38
nicephore- Messages : 612
Date d'inscription : 14/06/2014
Localisation : Créteil
Page 1 sur 2 • 1, 2
» Chainage Smart Port Frsky
» FrSky Smart Port RPM and Temperature Sensor
» FrSky & BetaFlight – Introduction d'un nouveau protocole > F.Port
» FrSky - Smart Port - Liste des IDs pour les capteurs