







QAV250/NAZE32/D4RII/TARANISX9D+
Le forum français des radios OpenTX ou FrOS :: Section des "Volants" :: Vos fichiers de configuration, images et sons

QAV250/NAZE32/D4RII/TARANISX9D+
par Invité Jeu 6 Nov 2014 - 5:51
merci à tout ceux qui m ont aidé à y voir plus clair
config
naze32 -full (pas forcement nécessaire pour ce genre de quad)
récepteur d4RII pour sa taille et la possibilité de passer en CPPM (la place est compté à l intérieur du châssis)
fpv
- cam sony pz0420
- tx immersion 600mW
Pour info vous devez reprendre le + de la batterie pour alimenter la cam et pas le output du tx qui délivre seulement 5V et qui n est suffisant pour l alimenter.
c est couillon mais j y ai passé une paire d heure. j ai même pensé un instant que mes goggles étaient nazes. bref!!!(ca peut servir pour d autres ;-) )
- googles skyzones
je laisse mon fichier eepe de mon quad pour commentaires et peut être pour infos pour de nouveaux et heureux possesseur de la Taranis.
encore merci
luc
- Fichiers joints

- qav250cppm.zip fichier eepe qav250(8 Ko) Téléchargé 49 fois
Invité- Invité
Re: QAV250/NAZE32/D4RII/TARANISX9D+
par LapinFou Jeu 6 Nov 2014 - 10:52
Sur les entrées/mixages, il vaut mieux utiliser les phases de vol, plutôt que les mêmes inters. Cela duplique le contrôle et peut poser des problèmes si tu changes l'inter (2 voir 3 endroits à faire la même modif...).
Dans entrée/mixage, tu retire l'inter et tu coche les cases correspondante aux phases de vol et du décoches toutes les autres.
Par ex ton monde HORIZON est la phase de vol 2. Donc, ton entrée/mixages correspondant à HORIZON, tu décoches tout SAUF le numéro 2.

Exemple:

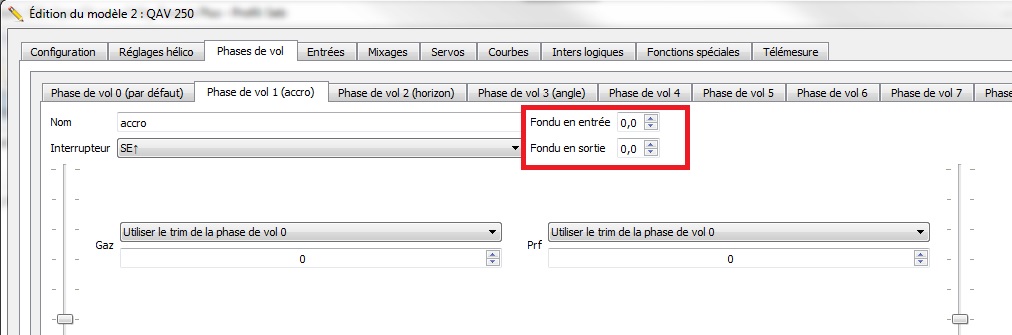
Astuce sympa (surtout en hélico), tu peux passer d'une phase de vol à l'autre en douceur (évite les accoups), en réglant le fondu quand tu entre et/ou sort d'une phase de vol. La transition devient progressive. En général 0.5s est suffisant.
A toi de tout vérifier. C'est juste pour expliquer le fonctionnement des phases de vol.
Après tu n'est pas obliger d'utiliser les phases de vol. L'avantage c'est de pouvoir utiliser des trim/variable globale/courbes/etc... différent pour chaque phase de vol.

LapinFou- Administrateur
-
 Messages : 16992
Messages : 16992
Date d'inscription : 09/09/2014
Age : 49
Localisation : Falaise -

Re: QAV250/NAZE32/D4RII/TARANISX9D+
par LapinFou Jeu 6 Nov 2014 - 11:02
T-Rex500_avec_barres_de_Bell.zip
Dernière édition par LapinFou le Mar 27 Jan 2015 - 19:22, édité 1 fois
LapinFou- Administrateur
- Messages : 16992
Date d'inscription : 09/09/2014
Age : 49
Localisation : Falaise -
Re: QAV250/NAZE32/D4RII/TARANISX9D+
par Invité Jeu 6 Nov 2014 - 14:22
je vais modifier tout ca
;-)
Invité- Invité
Re: QAV250/NAZE32/D4RII/TARANISX9D+
par LapinFou Jeu 6 Nov 2014 - 14:45
- Dans tes entrées/mixages, tu définies 3x la même chose sur 3 positions d'inter différent. Quel intérêt ??
- Si tu veux faire une action (vibreur/annonce vocale) lors d'un changement de phase de vol, il y a les "inters logiques" PV0, PV1, ... PV8 qui sont disponible dans le menu déroulant de l’onglet "Fonctions Spéciales".
- Concernant le seuil de tes alertes sur l'élément le plus faible de la LiPo, cela me semble un peu haut. Il faudrait ajuster ces tensions en créant un log et en analysant le tout sous Companion. En effet, il n'est pas rare de voir un élément chargé à fond descendre à 3.5V quand tu tires à fond sur les moteurs.
Calcul simple: U = R x I
Si la résistance internet de ta LiPo et de 8mOhm (info donnée par la plupart des chargeurs de LiPo), et que ton moteur tire 40A, alors une chute de tension de U= R*I = 0.008*40 = 0.32V ! Sans parler des petites pertes à travers le contrôleur et les connecteurs... Ta belle LiPo fraîchement chargée n'affichera déjà plus que 3.78V en charge (au lieu des 4.2V au repos). Donc, les seuils d'alertes dépendent de la qualité de tes LiPos, ainsi que de la conso de tes brushless. La meilleure façon, de déterminer la bonne valeur est de loger, puis analyser les courbes. Perso mon 1er seuil est a 3.35V et le 2ème seuil critique est à 3.2V. Comme je n'ai pas encore beaucoup volé avec ma Taranis (reçu il y a un peu plus d'un mois), ne prend pas pour argent comptant ces valeurs...
LapinFou- Administrateur
- Messages : 16992
Date d'inscription : 09/09/2014
Age : 49
Localisation : Falaise -
Re: QAV250/NAZE32/D4RII/TARANISX9D+
par LapinFou Jeu 6 Nov 2014 - 14:57
SI condition
remplace par ça
SINON condition
remplace par ça
SINON
remplace par ça
Pour les programmeurs: if ... else if ... else if ... else ...
Donc tu n'as pas besoins de définir tout les cas possible du moment que tu as un cas par défaut. Même chose pour les phases de vol, la phase de vol par défaut est la phase de vol 0.
Ex sur mon Yak avec un réglage petits/grands débattements:

Même si un inter a un problème mécanique, il prendra forcement une des 3 positions possible (pour un inter 3 positions), pas une pseudo 4ème position non gérée par la radio !! Je précise ce point, car il y a une légende urbaine qui dit: "j'ai défini mes 3 positions, mais j'en ajoute une par défaut au cas où...". Cela ne sert à rien et je tiens l'info directement de l'un des programmeurs d'OpenTX: Kilrah.
Dernière chose: quand tu voles en électrique prend l’habitude de ne PAS mettre de trim sur la voie des gaz. Cela est utile uniquement pour régler le ralenti d'un moteur thermique. En plus cela peut être dangereux...
LapinFou- Administrateur
- Messages : 16992
Date d'inscription : 09/09/2014
Age : 49
Localisation : Falaise -
Re: QAV250/NAZE32/D4RII/TARANISX9D+
par Invité Jeu 6 Nov 2014 - 15:30
amusez vous sur les commentaires ;-)
mes phases de vols sont la "pour le fun" pour le moment
je vais essayer de voir comment se comporte le quad avant de jouer sur les paramètres, courbes, etc...
:-)
Invité- Invité
Re: QAV250/NAZE32/D4RII/TARANISX9D+
par Invité Jeu 6 Nov 2014 - 15:33
Invité- Invité
Re: QAV250/NAZE32/D4RII/TARANISX9D+
par LapinFou Jeu 6 Nov 2014 - 16:04
LapinFou- Administrateur
- Messages : 16992
Date d'inscription : 09/09/2014
Age : 49
Localisation : Falaise -
Re: QAV250/NAZE32/D4RII/TARANISX9D+
par .AleX. Jeu 6 Nov 2014 - 21:50
- Angle = stabilisé et limité en angle (préférable pour les premiers vols)
- horizon = juste stabilisé, les flips sont possibles
- normal ou 'Rate' = aucune limite, pas d'auto-stabilisation

.AleX.- Messages : 1459
Date d'inscription : 24/11/2013
Localisation : Clermont-Fd(63) ou parfois Annecy(74)
Re: QAV250/NAZE32/D4RII/TARANISX9D+
par Invité Ven 7 Nov 2014 - 8:26
crois moi ca sert Mr le Lapin merci beaucoup .
Invité- Invité
Re: QAV250/NAZE32/D4RII/TARANISX9D+
par Invité Ven 7 Nov 2014 - 8:37
C est en prévision, pour le moment c 'est mon contrôleur de vol qui va gerer ca. par la suite j ajusterai certainement des paramètres
C est aussi pour jouer et comprendre la logique de programmation de la taranis.
Invité- Invité
Re: QAV250/NAZE32/D4RII/TARANISX9D+
par LapinFou Ven 7 Nov 2014 - 9:18

_________________
Pas de support par MP !! Pour garder l'esprit communautaire, on partage tout sur le forum.

Maintenant que vous avez tout lu, vous pouvez poser vos questions !
OpenTX is user friendly!!! It's just selective about who its friends are....
LapinFou- Administrateur
- Messages : 16992
Date d'inscription : 09/09/2014
Age : 49
Localisation : Falaise -
Re: QAV250/NAZE32/D4RII/TARANISX9D+
par Invité Ven 7 Nov 2014 - 13:27
Les phases de vol, bon sang, les phases...
Invité- Invité
Re: QAV250/NAZE32/D4RII/TARANISX9D+
par LapinFou Ven 7 Nov 2014 - 13:37
J'adore ton avatar As-tu un avis éclairé sur les seuils d'alerte pour les éléments LiPo ? Actuellement je met une alarme critique à 3.2v.
_________________
Pas de support par MP !! Pour garder l'esprit communautaire, on partage tout sur le forum.
Maintenant que vous avez tout lu, vous pouvez poser vos questions !
OpenTX is user friendly!!! It's just selective about who its friends are....
LapinFou- Administrateur
- Messages : 16992
Date d'inscription : 09/09/2014
Age : 49
Localisation : Falaise -
Re: QAV250/NAZE32/D4RII/TARANISX9D+
par Invité Ven 7 Nov 2014 - 15:02
voici mon nouveau modèle.
Invité- Invité
Re: QAV250/NAZE32/D4RII/TARANISX9D+
par Invité Ven 7 Nov 2014 - 15:13
à vos commentaires ;-)
luc
- Fichiers joints
- QAV250evo.zip (8 Ko) Téléchargé 69 fois
Invité- Invité
Re: QAV250/NAZE32/D4RII/TARANISX9D+
par Invité Ven 7 Nov 2014 - 16:16
En plus comme je veux pas bousiller mes accus à 80/100€ pièce j'évite de descendre trop bas.
Par contre pour un multimoteur s'il faut revenir de loin, il faut garder une bonne sécurité car on ne peux pas couper les moteurs pour rentrer. J'ai déjà vu des drones se planter à 200/300m ou plus par manque de jus dans les batteries.
Invité- Invité
» Aide : QAV250 + D4R-II en ppm + Naze32 acro
» peut-on enregistrer le log d'un vol avec TaranisX9D ?
» Glass du sud est en QAV250 :-)
» ARME QAV250
Le forum français des radios OpenTX ou FrOS :: Section des "Volants" :: Vos fichiers de configuration, images et sons